Real-time color detection using a camera can be achieved through the use of computer vision techniques and image processing algorithms. One common method is to use the HSV (Hue, Saturation, Value) color space, which separates colors into their hue, saturation, and value components. By filtering the video feed based on a specific range of hue, saturation, and value values, it is possible to detect and track objects of a specific color in real-time.
One way to implement this is to use a library such as OpenCV, which provides a wide range of image processing functions and has built-in support for color detection in the HSV color space. In OpenCV, you can convert the video frame from the RGB color space to the HSV color space using the cv2.cvtColor() function, then use the cv2.inRange() function to filter the video feed based on a specific range of HSV values.
Once the video feed has been filtered, you can use image processing techniques such as contour detection to find the boundaries of the objects of the specific color, and then use the center point of the contour to track the object.
Another approach is to use deep learning based object detection models such as YOLO, SSD, or RetinaNet, which can detect and track objects in real-time, and these models can be fine-tuned to detect specific colors.
Overall, real-time color detection using a camera is a complex task that requires knowledge of image processing, computer vision and deep learning techniques.
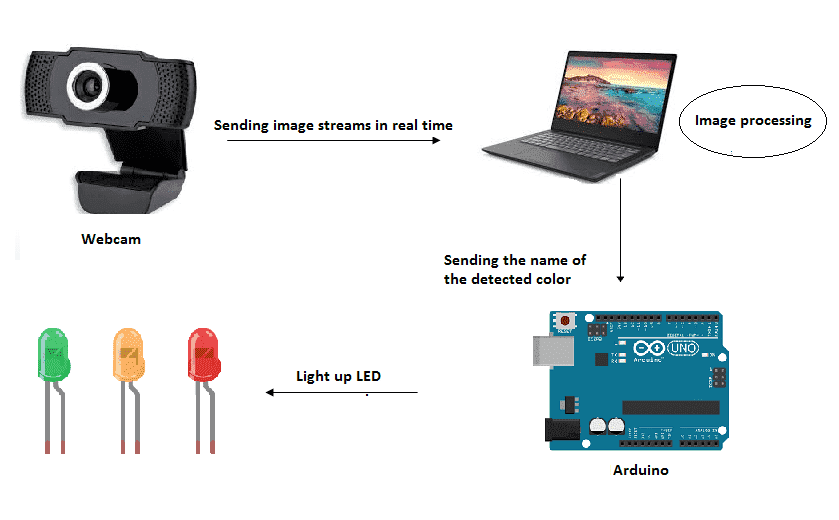
Real-time color detection using a webcam, Arduino, and a computer can be achieved by using the webcam to capture video frames, sending them to the computer for processing, and then using the Arduino to control devices based on the color detection results.
One way to implement this is to use a webcam connected to a computer running a program that uses the OpenCV library for image processing to detect and track objects of a specific color in real-time. The program can then send the color detection results to the Arduino via a serial connection.
The Arduino can then use this information to control other devices connected to it, such as motors or LEDs. For example, the Arduino can control a servo motor to track the movement of the object of a specific color or turn on an LED when an object of a specific color is in a specific location.
Alternatively, the computer can use deep learning based object detection models such as YOLO, SSD, or RetinaNet, which can detect and track objects in real-time, and these models can be fine-tuned to detect specific colors. Once the object is detected and localized, the computer can use the position of the object to control the actuators connected to the arduino.
Project description :
For a robot to visualize the environment, alongside object detection, real-time color detection is also very important.
In this context, we have produced a vision system that can detect colors in real time and light the LEDs according to the colors detected.
The colors detected by this system are: red, blue, green and yellow.
This system consists of a computer, a webcam and the Arduino board.
You can also see


0 commentaire
Leave a comment


Recent tutorials





Most viewed tutorials





Most commented tutorials




Scroll to Top