Arduino Servo motor
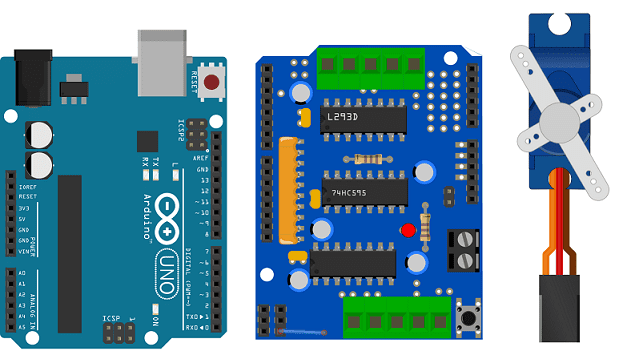
Control two servo motors by the Arduino and the Shield L293D module
Purpose of this tutorial
To control a servo motor with an Arduino and an L293D shield module, you can follow these steps:
- Connect the servo motor to the L293D shield module. The servo motor typically has three wires: power, ground, and signal. The power and ground wires should be connected to the power and ground terminals on the L293D shield module. The signal wire should be connected to one of the digital output pins on the shield module. Make sure to refer to the servo motor’s datasheet for the specific pinout.
- Connect the L293D shield module to the Arduino. The shield module should be mounted on top of the Arduino, with the pins aligned. Make sure to use the correct pins on the Arduino to connect the shield module. The shield module may also require external power, depending on the power requirements of the connected motors.
- Write a program to control the servo motor. In your Arduino IDE, write a program that uses the Servo library to control the servo motor. The Servo library provides functions that make it easy to set the position of the servo motor. Here’s an example program that sets the servo to a specific angle.
- Upload the program to the Arduino. Once you’ve written your program, upload it to the Arduino using the Arduino IDE. The program should begin running immediately and the servo motor should start moving according to the program’s instructions.
Necessary components
Arduino UNO

Arduino Uno is a microcontroller board based on the ATmega328P microcontroller. It is one of the most popular and widely used boards in the Arduino family. The board has 14 digital input/output pins, 6 analog input pins, a 16 MHz quartz crystal, a USB connection, a power jack, an ICSP header, and a reset button.
The digital pins on the board can be used as either input or output pins. The analog pins can be used to read analog voltage values from sensors or other devices.
The USB connection can be used to program the board and also to communicate with it over a serial connection. The power jack can be used to power the board using an external power supply, while the ICSP header can be used for in-circuit programming of the microcontroller.
The Arduino Uno board can be programmed using the Arduino IDE, which is a free, open-source development environment. The IDE provides a user-friendly interface for writing, uploading, and debugging code on the board. The Arduino language is based on C/C++, and there are a wide range of libraries and examples available to help users get started with the board and build their own projects.
Shield module L293D
The L293D is a commonly used integrated circuit (IC) that functions as a motor driver or shield for controlling DC motors or stepper motors. It is often used in robotics, CNC machines, and other projects that involve motor control.
The L293D contains two H-bridges, which are circuits that allow a microcontroller or other control circuit to drive a motor in both directions (forward and reverse). Each H-bridge can drive a load of up to 600 mA, with a peak current of 1.2 A. The L293D also has built-in flyback diodes, which help protect the IC and the rest of the circuit from voltage spikes that can occur when the motor is turned off.
The L293D can be controlled by a microcontroller or other control circuit using four input pins. By setting the appropriate input pins high or low, the motor can be made to rotate in the desired direction and at the desired speed. The L293D also has two enable pins that can be used to turn the motor on or off.
Servo motor

A servo motor is an electromechanical device that is commonly used in control systems to provide precise control of position, speed, and acceleration. It consists of a small electric motor connected to a feedback device, such as an encoder or potentiometer, which enables the motor to know its current position and make precise movements based on control signals.
Servo motors are commonly used in robotics, CNC machines, and other industrial applications where precise motion control is required. They are also found in many consumer products such as RC cars, drones, and hobbyist robotics.
One of the advantages of servo motors is their ability to maintain a steady speed even under varying load conditions. They are also capable of providing high torque output and precise positioning accuracy. Servo motors can be controlled using a variety of methods, including analog signals, pulse-width modulation (PWM), and digital signals.
9V Battery

A 9V battery is a small, rectangular-shaped battery that provides a nominal voltage of 9 volts. It is commonly used in a wide range of electronic devices, such as smoke detectors, portable radios, and guitar effects pedals, among others.
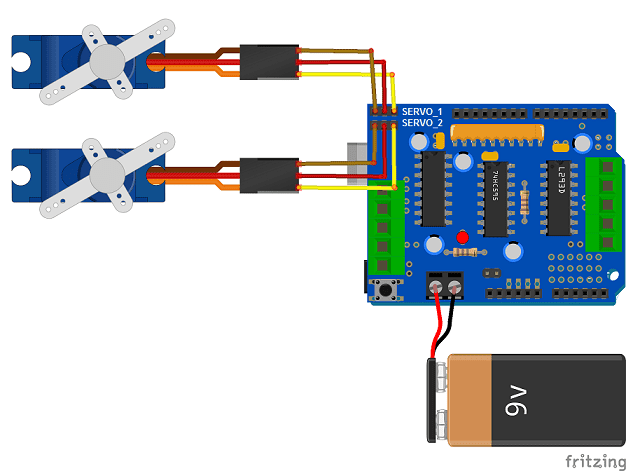
Assembly :
1- Connect the L293D module to the Arduino UNO board
2- Connect the first servomotor to port servo1 of the L293D module
3- We connect the second servomotor to the servo2 port of the L293D module
Arduino program
Here is the Arduino program that allows you to control two servomotors by the Arduino board and the Shiel L293D module:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 |
#include <Servo.h> Servo servo1; // create servo object to control servo 1 Servo servo2; // create servo object to control servo 2 int pos = 0; // variable to store the servo position void setup() { servo1.attach(9); // attaches the servo on pin 9 to the servo object servo2.attach(10); // attaches the servo on pin 10 to the servo object servo1.write(0); servo2.write(0); } void loop() { for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees // in steps of 1 degree servo1.write(pos); // tell servo1 to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees // in steps of 1 degree servo2.write(pos); // tell servo2 to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees servo1.write(pos); // tell servo1 to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees servo2.write(pos); // tell servo2 to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } } |
You can also see


0 commentaire
Leave a comment


Recent tutorials





Most viewed tutorials





Most commented tutorials




Scroll to Top