Le robot suiveur de ligne
Quand on débute en robotique, on rêve de pouvoir un jour passer simplement à
la programmation, de trouver un dessin d’une mécanique simple à réaliser ou de fabriquer une carte réduite au minimum, mais pouvant évoluer.
C’est dans ce but qu’a été construit ce robot.
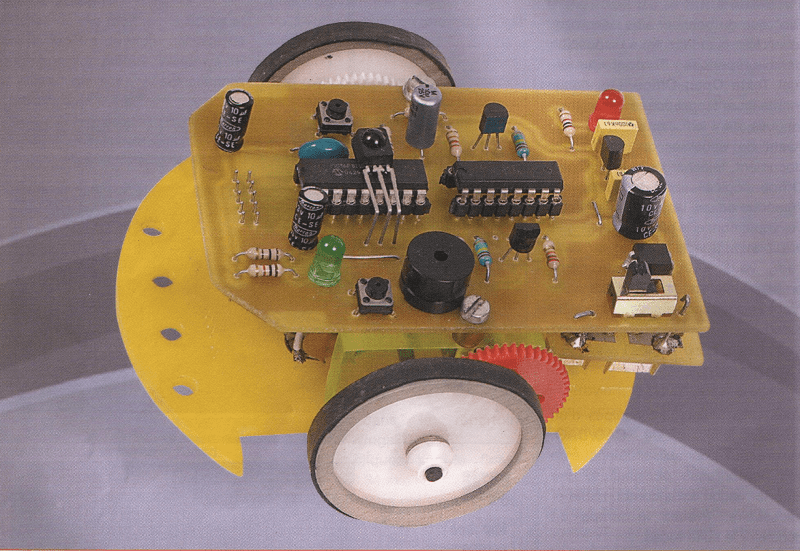
La mécanique et les roues du robot sont des réalisations « maison -. la carte de base est très simple, mais évolutive grâce à la présence d’un connecteur pouvant recevoir des cartes capteurs.
Le châssis
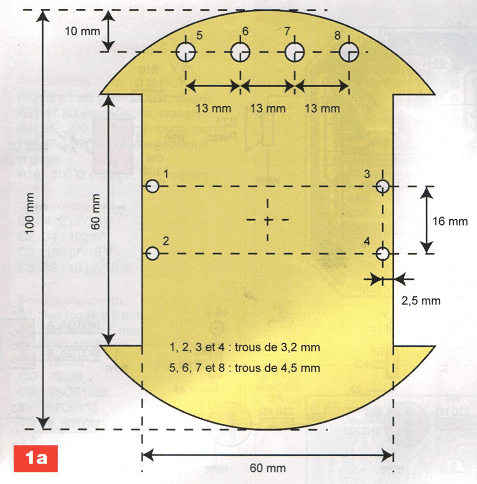
La mécanique est simple et peu onéreuse (figure 1a). Après plusieurs essais utilisant des moteurs très économiques, il s’est avéré que cette économie se faisait au détriment de la consommation du montage et de ses performances.
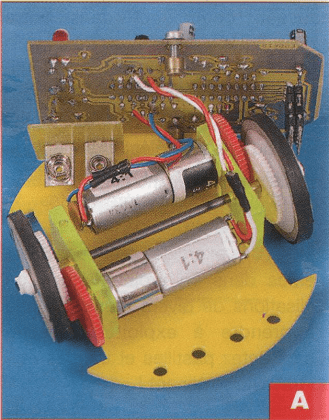
Il a donc été choisi deux petits moteurs de la série 941 D de ComoDrills, avec un réducteur planétaire de 4.
Leur consommation est inférieure à 150 mA chacun (photo A).
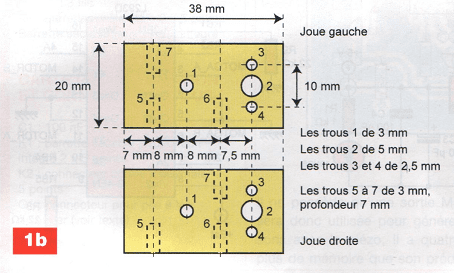
Nota. Il est toujours possible de récupérer le moteur seul, disponible dans un vieux lecteur de CD-Rom et de lui adjoindre un réducteur classique par 5 avec des engrenages économiques. Cela d’autant plus que nous allons en utiliser, des engrenages, pour réduire à nouveau par 5 la vitesse des roues. Les moteurs et l’axe des roues seront fixés par deux petites plaques de
5 mm d’épaisseur (figure 1b). Ces deux plaques devront être préparées sans précipitation. De leur précision, dépendra l’efficacité de la direction. Les moteurs y sont fixés par deux petites vis M2 et l’axe des roues les traversera de part en part. Ces deux pièces seront fixées entre la plaque inférieure, découpée aux dimensions d’un cercle de diamètre 10 cm, avec deux découpes pour le passage des roues. La fixation de ces pièces au châssis est réalisée par quatre vis M3. La carte électronique viendra se fixer au-dessus par deux vis M3 et deux entretoises M3 de 5 mm.
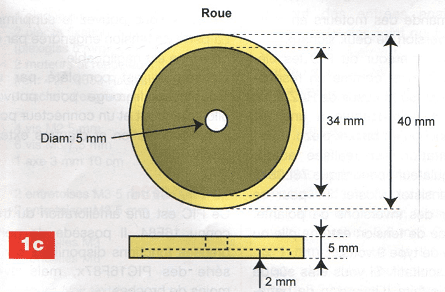
Les roues sont des éléments « maison ». Fort efficaces, elles ne sont pas très difficiles à réaliser (photo B). Une roue est composée de trois éléments (figure 1 c). Le pneu est découpé dans une chambre à air de vélo, la partie externe de la jante réalisée avec un morceau de tube PVC de 40 mm et le disque interne découpé dans une plaque de plexiglas de 3 mm d’épaisseur.
On coupe 5 mm de tube PVC avec une boîte à onglet. On découpe ensuite un carré de 37 mm dans le plexiglas et on perce, en son centre, un trou de 5 mm de diamètre. On transforme le carré en un disque à la lime pour entrer « en force » dans le bout de tube. Pour réaliser cela assez simplement, il faut fixer le carré dans un mandrin de perceuse que l’on fera tourner à vitesse moyenne.
Un engrenage de couleur rouge sera fixé sur l’axe des moteurs. Il entraînera un engrenage de couleur blanche sur lequel on aura inséré « en force» la roue réalisée en intercalant une rondelle M6 entre les deux.
On placera une entretoise M3 sur l’axe avant de mettre la roue. Celle-ci sera bloquée par une bague d’arrêt.
La carte principale
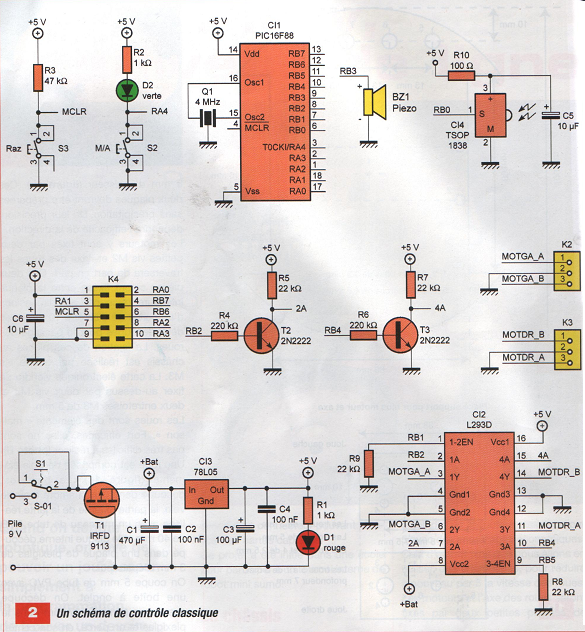
Le schéma est sûrement l’un des plus classiques pour contrôler un petit robot : un microcontrôleur, un circuit interface pour deux moteurs, un régulateur de tension et un connecteur pour extension et programmation (figure 2).
On y retrouve, en plus d’un PIC16F88, un circuit spécialisé pour la commande des moteurs, le L293D. Les deux transistors T2 et T3 sont associés à ce dernier pour simplifier la commande des moteurs en réalisant l’inversion de deux signaux.
On trouvera autour du PIC les éléments de base, comme un résonateur 4 MHz, un poussoir de RAZ et un autre poussoir associé à une led verte, ainsi qu’un buzzer piézo. L’alimentation est réalisée autour d’un régulateur économique 78L05 et d’un transistor Mosfet T1 pour se protéger des inversions de polarité. La source de tension est une pile ou un accu de type 9 volts.
T1 est facultatif. Si vous êtes sûr de ne jamais faire d’inversion de batterie, alors vous pouvez le supprimer. La perte de tension engendrée par sa présence est négligeable. L’ensemble est complété par un récepteur infrarouge pour pouvoir piloter le robot et un connecteur pour la programmation et d’autres extensions.
Le PIC16F88
Ce PIC est une amélioration du très connu 16F84. Il possède de nombreuses fonctions disponibles sur la série des PIC16F87x, mais avec moins de broches.
Il ne possède qu’une sortie MU qui sera donc utilisée pour générer des sons avec le piézo. » a quatre fois plus de mémoire que son prédécesseur, trois registres temporisateurs et surtout des entrées analogiques. C’est ce dernier point qui justifie son choix. Effectivement, la plupart des capteurs en robotique délivrent une information de type analogique.
Nomenclature
CARTE PRINCIPALE
Condensateurs
- C1 : 470 IJF/16 V
- C2, C4 : 100 nF
- C3: 100 IJF/16 V
- C5, C6: 10 IJF/16 V
Semiconducteurs
- D1 : led rouge 0 5 mm
- D2 : led verte 0 5 mm
- CI1 : PIC 16F88
- C12: l2930
- C13: 78L05
- CI4 : TSOP1838
- T1 :IRFD9113
- T2, T3 : 2N2222 (T092)
Résistances ± 5% – 1/4 W
- R1, R2 : 1 kn (marron, noir, rouge) R3 : 47 kn Oaune, violet, orange)
- R4, R6 : 220 kn (rouge, rouge, jaune) R5, R7 à R9 : 22 kn (rouge, rouge, orange)
- R10 : 100 n (marron, noir, marron)
Divers
- Q1 : résonateur 4 MHz
- BZ1 : piézo
- S1 : inter
- S2, S3 : poussoir CI
- K2, K3 : 3 fils
- K4 : barrettes mâle/mâle 2 x 5 points Barrette sécable pour circuit intégré
CARTE PROGRAMMATION ET CONNECTEUR ACCUS
- C1:100nF
- K1 : barrette sécable pour circuit intégré 2 x 5 points
- K2 : connecteur coudé mâle/mâle 5 points
- G1 : connecteur pour pile 9 V à souder (voir texte)
PIÈCES MÉCANIQUES
- 1 plaque châssis (plexiglas 3 mm) 2 pièces fixation moteur châssis (plexiglas 5 mm)
- 2 moteurs et réducteurs
- 1 sachet d’engrenage module 0,5
- 4 vis M2 5 mm
- 6 vis M3 7,5 mm
- 1 axe 3 mm 10 cm
- 2 entretoises M3 5 mm très fines 2 entretoises M3 5 mm
- 2 rondelles M3 2 rondelles M6
- 2 roues (voir texte)
La réalisation
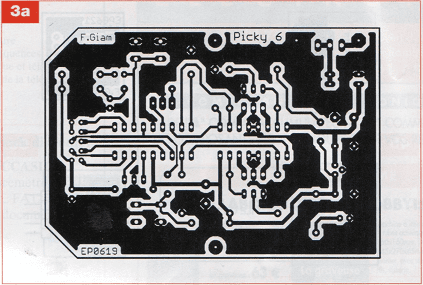
On découpe correctement la carte principale dont on lime les bords.
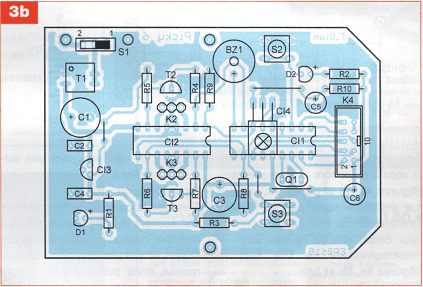
On perce, en premier, tous les trous avec un foret de 0,8 mm. On reperce à 1 mm les trous de l’interrupteur, ceux des deux poussoirs et, pour finir, à 3,2 mm les deux trous de fixation de la carte au châssis (figure 3a). On soude ensuite les composants dans l’ordre habituel, ceux de plus bas profils en premier, les quatre straps, puis les résistances, le support de CI, les poussoirs, le résonateur, les connecteurs, le condensateur, les diodes et, en dernier, les capteurs à réflexion (figure 3b). Petite particularité au niveau du connecteur pour les extensions : il faut ajouter des morceaux de barrettes sécables pour augmenter la distance entre la carte principale et les cartes d’extensions futures.
Remarques
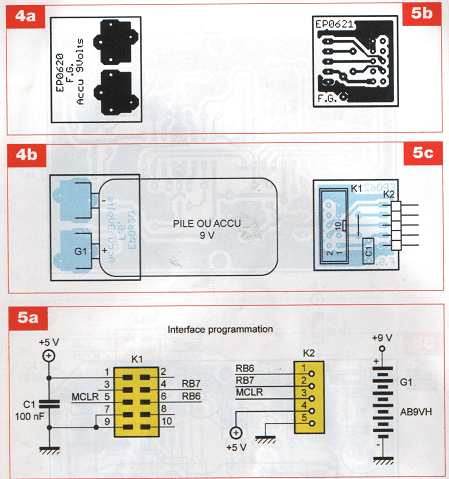
Deux petites cartes additionnelles sont nécessaires pour parfaire le montage. La première est une petite
interface pour connecter la pile de 9 volts à deux connecteurs spéciaux (figures 4a, 4b et photo A).
La deuxième carte permet la programmation du PIC par un connecteur dédié, afin de ne pas sortir le microcontrôleur de son support (figures 5a, 5b et 5c).
La carte pour la pile sera soudée et maintenue à l’envers de la carte principale par deux fils rigides en cuivre étamé de 1,5 mm de diamètre, améliorant ainsi la rigidité de l’ensemble. La carte programmation sera insérée sur la carte principale à l’envers et pourra être laissée en place pendant la partie développement.
La programmation
Lorsque l’on conçoit un robot, même très simple, on se doit de définir les besoins dès le début du projet.
Pour notre robot éducatif, quelques éléments de base sont nécessaires car il faut pouvoir tester simplement chaque phase de la programmation. Bien avant de faire tourner les moteurs, il faut s’essayer sur des pro¬grammes simples. Une LED verte, un poussoir et un piézo sont des éléments simples à mettre en œuvre par programmation.
Bien que la commande des moteurs soit souvent le point le plus délicat à maîtriser, nous avons tenu à la rendre la plus simple possible. Pour chaque moteur, nous avons une ligne pour choisir le sens de rotation et une autre pour la vitesse.
S’agissant d’une ligne logique, la variation de vitesse d’un moteur sera obtenue par découpage de la tension appliquée. C’est la commande, bien connue, de type MU (Modulation de la largeur des impulsions).
Cette fonction est une phase délicate de la programmation de notre robot qui ne possède qu’un seul registre pour la réaliser. Il a donc été nécessaire de l’écrire entièrement pour les deux moteurs. Pour l’optimiser, elle est écrite en assembleur, alors que le reste du programme est écrit en C. Nous obtenons un code très court et très simple.
Il reste le récepteur infrarouge. Là encore, un module IR complet pour TV permet de simplifier l’électro¬nique. Il attaque une ligne du PIC, RBD, qui permet d’inter¬rompre le programme pour décoder la commande. Il a été choisi de piloter le robot avec une télécommande au format Philips RC5, ce qui est le plus courant.
L’utilisation
Dans cette première partie, nous n’utilisons pas de capteur. Aucune extension n’est branchée. Nous nous contenterons de piloter le robot avec la télécommande infrarouge.
À la mise sous tension par l’interrupteur, le programme entre dans une boucle de test. La LED verte clignote et le piézo émet un son aigu intermittent.
Si l’on appuie sur le poussoir, le piézo confirme cet appui par un son plus grave très bref et la led s’éteint.
Le robot est prêt à recevoir une commande. Si l’on appuie sur une touche d’une télécommande, la LED verte s’éclaire pour confirmer une réception. Mais seule une commande valide pourra piloter le robot.
Les touches 2, 4, 6, 8 permettent de déplacer le robot en marche avant, arrière, rotation sur place, vers la droite ou vers la gauche. La touche 5 et la touche arrêt TV coupent les moteurs. Pour augmenter la vitesse, il convient d’appuyer plusieurs fois. Pour réduire, il faut appuyer sur la touche opposée.
Pour conclure
Voici la première partie de notre robot terminée. Dans notre prochain article, nous aborderons les extensions qui rendront notre robot totalement autonome. Une première extension permettra de suivre une source de lumière et une autre réalisera un robot suiveur de ligne.

3 commentaires
Leave a comment


Articles récents





Articles les plus vus





Articles plus commentés


Scroll to Top
Marchel 27-11-2323
It's a shame you don't have a donate button! I'd definitely donate to this excellent blog! I guess for now i'll settle for book-marking and adding your RSS feed to my Google account. I look forward to new updates and will share this site with my Facebook group. Talk soon!
Mr Scweez 27-11-2323
Amazing! Its truly remarkable paragraph, I have got much clear idea about from this article.
IBTISSAM 04-03-2222
je voudrai faire un robot suiveur de ligne avec pic langage assembleur et je voudrai savoir toutes les composants ecessaires pour l effectuer