Robot explorateur
La robotique « ludique » est en plein essor. Pour s’en convaincre, il suffit de regarder le rayon « jouets » de pratiquement tous les magasins, en particulier au moment de Noël. Les robots attirent aussi bien les petits que les grands. Cependant, utiliser un produit fini ne procure pas le même plaisir que construire son propre modèle. C’est pourquoi nous vous proposons aussi souvent que possible des réalisations dans ce domaine.
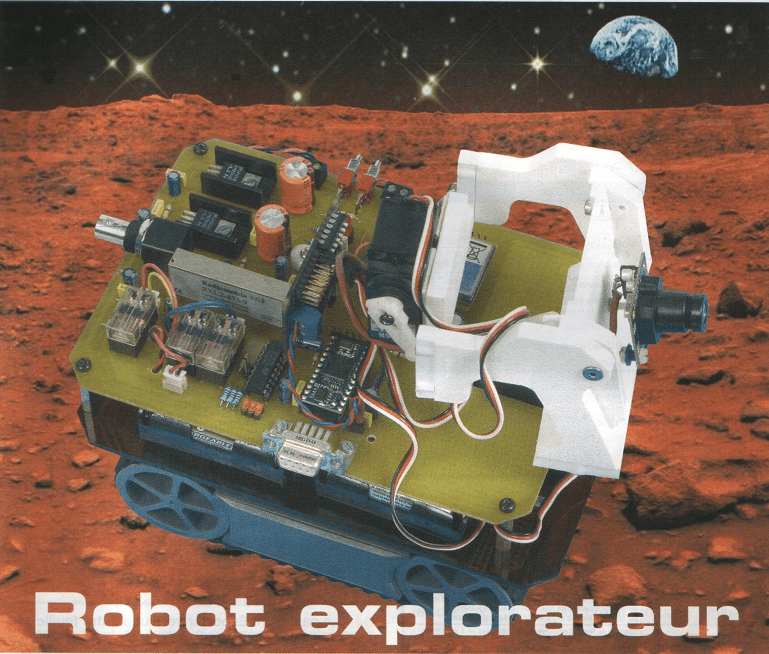
Tractor, le robot explorateur que nous décrivons dans ces pages, est un modèle relativement simple qui possède une fonction de base : il est doté d’une caméra permettant de le piloter dans des endroits où il n’est pas visible par l’utilisateur.
Ce robot explorateur est également évolutif car nous avons laissé « libres » plusieurs ports d’entrées/sorties permettant la commande de divers systèmes tels des capteurs infrarouges ou ultrasons, des télémètres, des servomoteurs, etc.
La réalisation de « Tractor » est relativement aisée car nous avons fait appel à plusieurs sous-ensembles qui simplifient notablement la mise au point de l’électronique et des logiciels.
Le prix de revient s’en ressent quelque peu, mais la reproductibilité est assurée et l’on obtient immédiate¬ment un fonctionnement correct.
Caractéristiques générales
Les caractéristiques du robot sont les suivantes:
– le châssis est un modèle à chenilles, mues par deux moteurs CC
– une tourelle sur laquelle est fixée une caméra est orientable au moyen de deux servomoteurs suivant les axes X et Y
– un module récepteur intégré (bande des 433 MHz) reçoit les ordres permettant de piloter le mobile dans toutes les directions, ainsi que d’orienter la caméra
– un émetteur vidéo/audio intégré (bande des 2,4 GHz) émet le signal vidéo issu de la caméra
– les servomoteurs sont commandés par un module, au moyen d’ordres très simples. Ce module peut piloter jusqu’à huit servomoteurs
– Cinq sorties pour servomoteurs supplémentaires sont laissées « libres » et peuvent être utilisées par le réalisateur
– la télécommande est équipée d’un module émetteur intégré et d’un récepteur vidéo/audio pouvant être raccordé à n’importe quel moniteur ou téléviseur disposant d’une entrée vidéo (1 V, 75 Ω)
– Onze ports d’entrées/sorties supplémentaires du microcontrôleur sont accessibles sur des connecteurs pour des applications futures.
L’un d’eux est un port de puissance permettant de disposer d’un niveau de 5 V sous 200 mA
Les modules 433 MHz
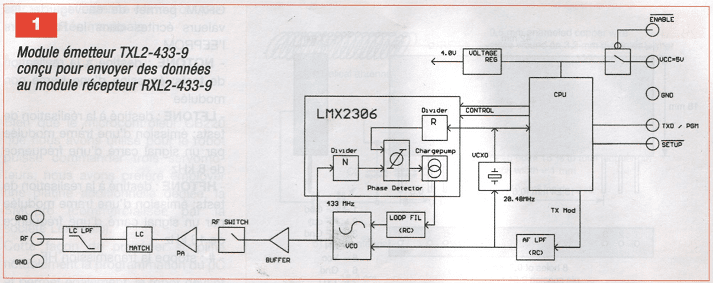
Les modules utilisés pour la télécommande de robot « Tractor » sont les nouveaux émetteurs et récepteurs de la gamme Radiometrix. Ces deux modules sont en fait un modem TLD2A-433 bidirectionnel qui a été séparé en deux parties : la partie émettrice et la partie réceptrice. L’émetteur assure la transmission unidirectionnelle des signaux numériques séries issus du microcontrôleur de la télécommande de manière totalement transparente. Le module génère en effet les trames de préambule, de synchro, ainsi que la mise en packets et le codage Manchester des données. Le débit peut être choisi entre 4 800 bps et 9 600 bps selon le modèle utilisé. Architecturé autour d’un ensemble synthétiseur/VCO stabilisé par quartz, le TXL2-433 est conçu pour envoyer des données au module récepteur RXL2-433. Les schémas internes sont donnés aux figures 1 et 2. Ces deux modules peuvent être configurés sur huit adresses différentes au moyen d’un système d’adressage interne paramétrable. Cinq fréquences de travail peuvent également être choisies dans la bande des 433 MHz.
La configuration des modules est très simple. Il suffit d’utiliser « l’HyperTerminal » sous Windows afin d’envoyer les commandes de configuration qui ne sont qu’au nombre de huit (en positionnant la broche SETUP du TXL2-433 et la broche PGM/ du RXL2-433 à la masse) :
– ADDRO à ADDR8 : permet de déterminer une adresse particulière afin de créer des mini-réseaux de communication
– CHAN à CHAN4 : permet de fixer l’une des fréquences de travail parmi cinq
– SETPROGRAM : les paramètres des adresses et des fréquences détermi-nés par les instructions ADDRx et CHANx sont stockés en mémoire RAM, ce qui implique que lors de la coupure de l’alimentation du module, à la mise sous tension suivante, les paramètres par défaut de l’EEPROM interne seront rechargés (paramètres par défaut). La commande SETPROGRAM permet de sauvegarder les valeurs écrites dans la RAM vers l’EEPROM
– NOTONE : destiné à la réalisation de tests; émission d’une trame non modulée
– LFTONE : destiné à la réalisation de tests; émission d’une trame modulée par un signal carré d’une fréquence de 8 kHz
– HFTONE : destiné à la réalisation de tests; émission d’une trame modulée par un signal carré d’une fréquence de 16 kHz
– # : stoppe la transmission HF
Les modules TXL2-433 et RXL2-433
Les caractéristiques électriques des modules sont les suivantes:
– Fréquences – 5 canaux au choix:
• 434,245 MHz
• 433,285 MHz
• 433,605 MHz
• 434,565 MHz
• 433,925 MHz (fréquence par défaut)
– Stabilité en fréquence: +/-10 kHz
– Largeur de bande d’un canal: 320 kHz
– Alimentation:
• 5 Vcc
• 25 mA en émission et 8mA en mode « id le » pour le TXL2-433
• Puissance d’émission de 10 mW (+10 dBm)
• 22 mA en réception et en mode » idle » (sommeil) pour le RXL2-433
• -107dBm de sensibilité du récepteur RXL2-433
– Dimensions:
• 43 x 19 x 7 mm pour le TXL2-433
• 33 x 23 x 7 mm pour le RXL2-433
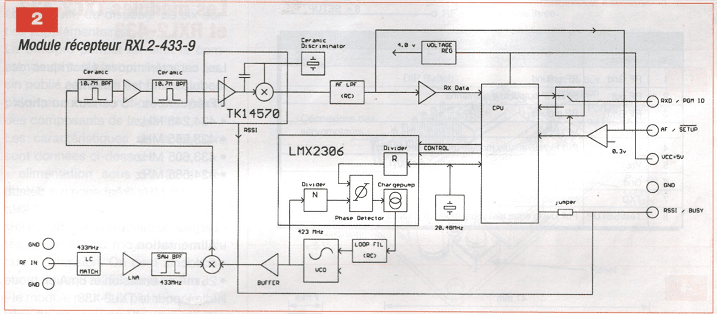
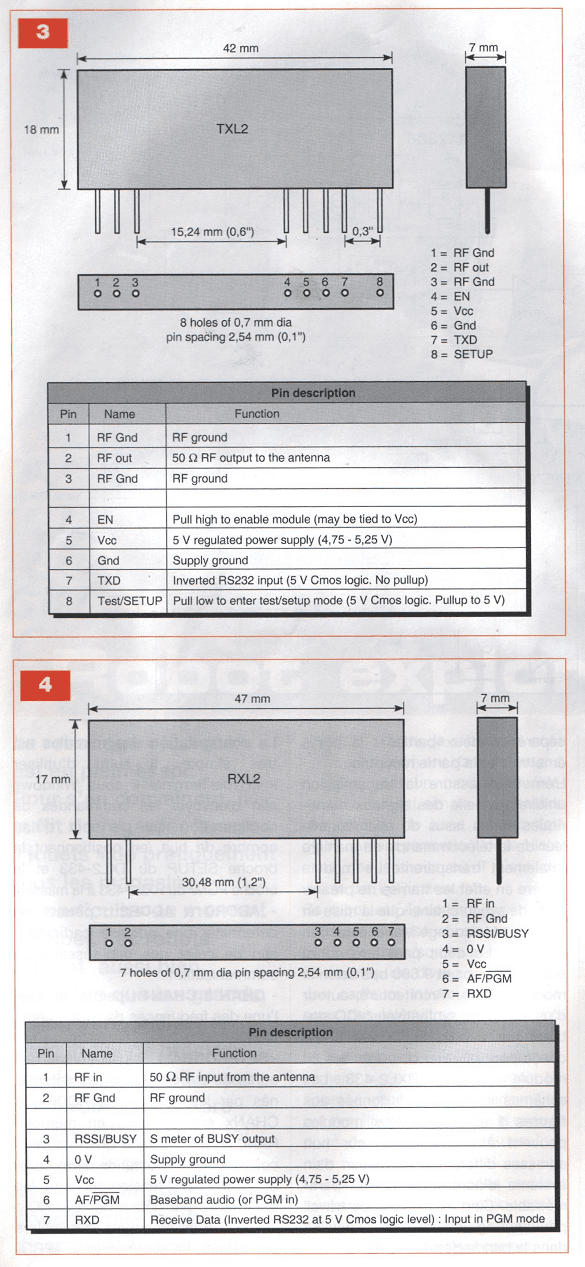
Le brochage des deux modules est donné aux figures 3 et 4.
Le TXL2-433 dispose d’une broche (EN) qui peut être utilisée, en la connectant à la masse, pour arrêter le fonctionnement de l’émetteur.
Le RXL2-433 possède une broche RSSI qui indique l’amplitude du signal reçu et qui peut également servir à visualiser, via un transistor et une led, la réception d’une donnée. Plusieurs types d’antennes peuvent être utilisés selon la portée désirée. La figure 5 représente les trois principaux : hélicoïdale, boucle (circuit imprimé) et brin. L’antenne la plus efficace est l’antenne « brin » qui permet la portée maximale.
La commande des servomoteurs
Bien que le microcontrôleur CB220 que nous avons utilisé pour le robot puisse commander trois servomoteurs, nous avons préféré employer une platine additionnelle dédiée, la SMCpro (commercialisée par la société Lextronic).
Cette façon de procéder simplifie notablement la programmation du µC et permet également, le robot devant être évolutif, de disposer de six sorties supplémentaires.
La SMCpro permet en effet la commande de huit servomoteurs. Le dessin publié en figure 6 montre l’aspect physique et la fonction de chacun des composants de la platine.
Les caractéristiques de la SMCpro sont données ci-dessous:
– alimentation sous 5V (faire très attention à la polarité, le module n’étant pas protégé)
– huit SMCpro peuvent être connectés ensemble au moyen du port du bus d’extension. On peut ainsi commander jusqu’à 256 servomoteurs
– le module peut être piloté par le port série d’un PC
– le module peut être piloté par l’interface série d’un microcontrôleur (niveaux TIL)
– le débit de la communication est, au choix, de 4 800 bps ou 9 600 bps
– l’angle et la vitesse de déplacement peuvent être réglés séparément pour chacun des servomoteurs.
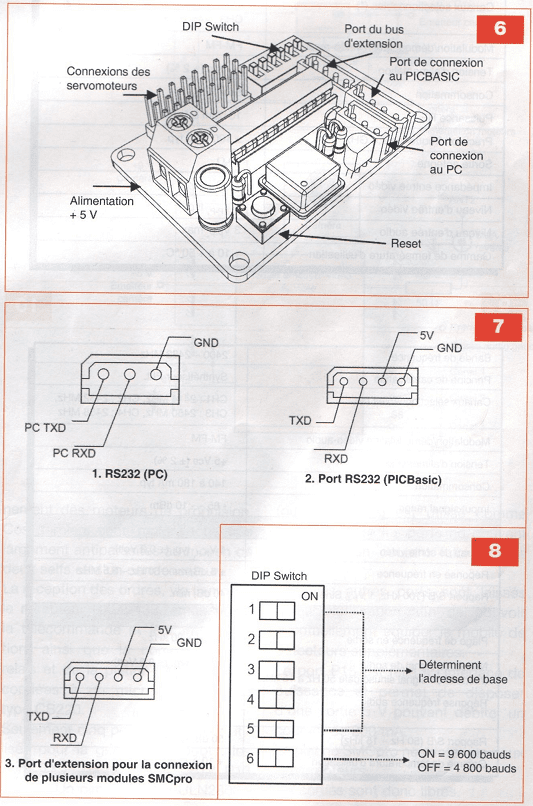
Les figures 7 et 8 donnent respectivement le brochage des divers connecteurs et la fonction du DIP Switch. La programmation de la platine SMCpro est très simple puisqu’il suffit de lui envoyer une série de trois données numériques.
Cette série se décompose ainsi:
Format de la donnée : [Numéro du servomoteur), [Message), [Donnée] où:
– Numéro du servomoteur entre 0 et 7
– Message: 0 si la donnée suivante
concerne la vitesse ou 1 si la donnée concerne l’angle de déplacement
– Donnée: 0 à 255 pour la vitesse et o à 180 pour l’angle.
Par exemple, le CUBLOC enverra Putstr 1,0, 0, 255 et Putstr 1, 0, 1,90. La première instruction envoie par le port série 1, un ordre au servomoteur, o lui indiquant la vitesse maximale. La seconde instruction envoie par le port série 1, un ordre au servomoteur, 0 lui indiquant de prendre la position neutre (90°).
Les modules vidéo 2,4 GHz
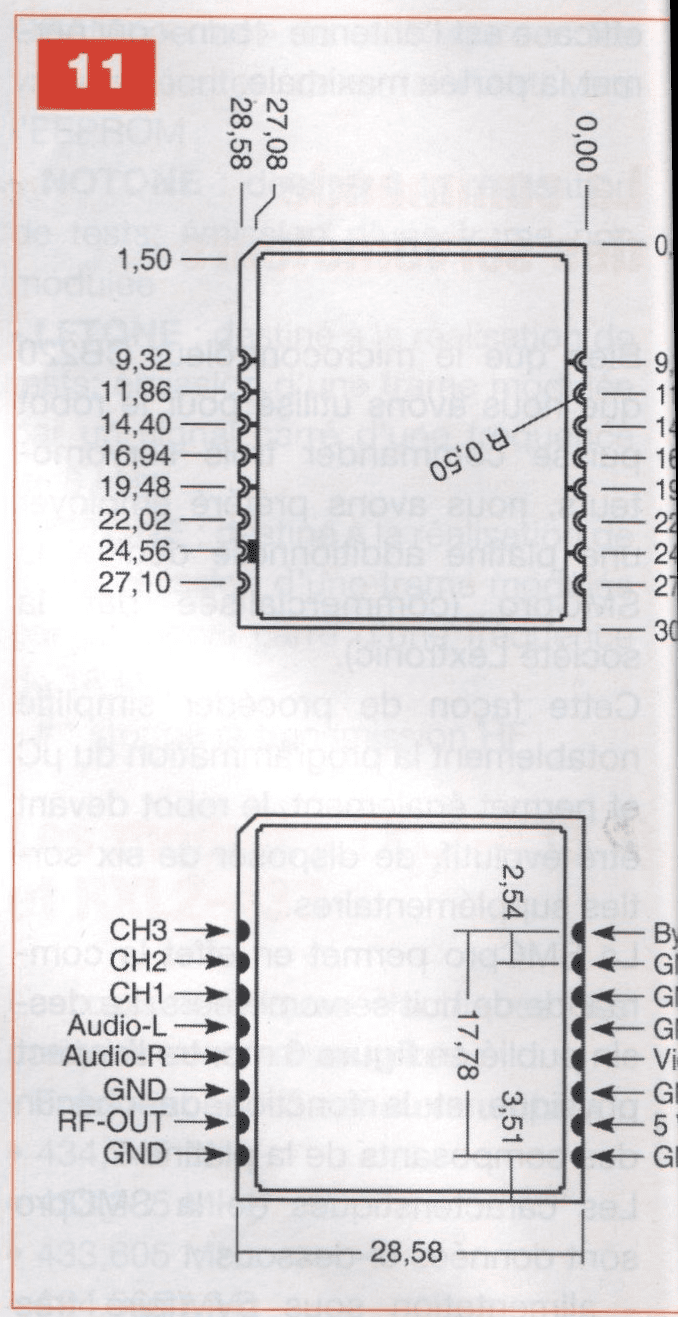
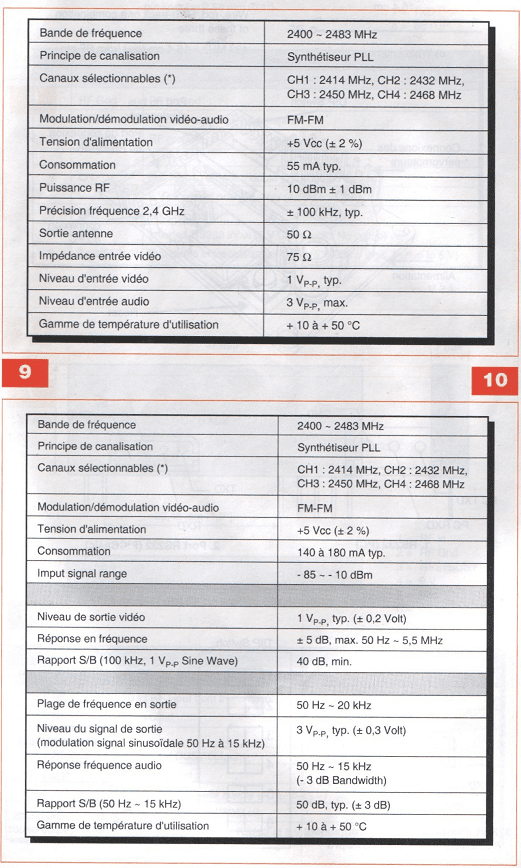
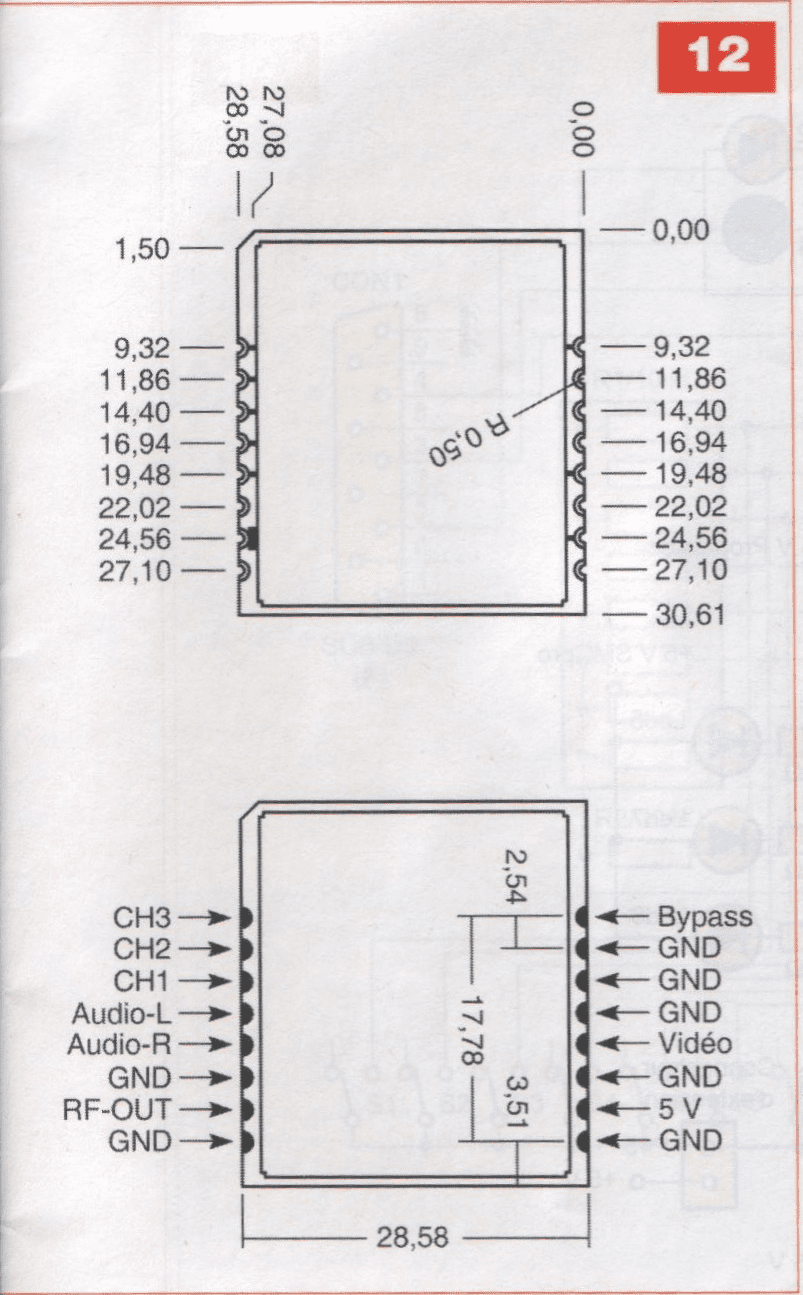
La transmission et la réception vidéo (et audio optionnelle) sont assurées par les modules AJV24r et AJV24e. Ces modules, distribués par la société Lextronic, sont connus de certains de nos lecteurs car nous les avions utilisés dans une précédente réalisation. Les tableaux donnés aux figures 9 et 10 indiquent les caractéristiques électriques de chacun des modules. Quant aux brochages et dimensions, ils sont représentés par les figures 11 et 12.
Cet ensemble E/R dispose de quatre fréquences de travail sélectionnables au moyen de petits commutateurs, Plusieurs modules peuvent alors être utilisés dans le même espace.
Un point important est à signaler : l’émetteur ne doit absolument pas être mis sous tension sans antenne, ce qui pourrait occasionner sa destruction.
Principe du robot Tractor
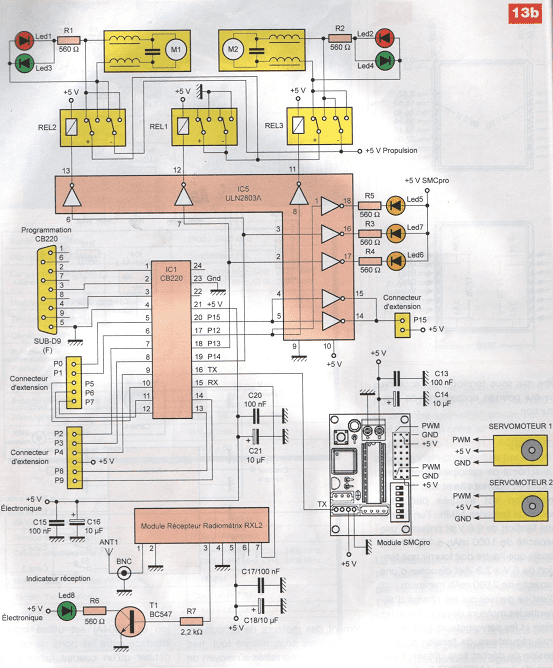
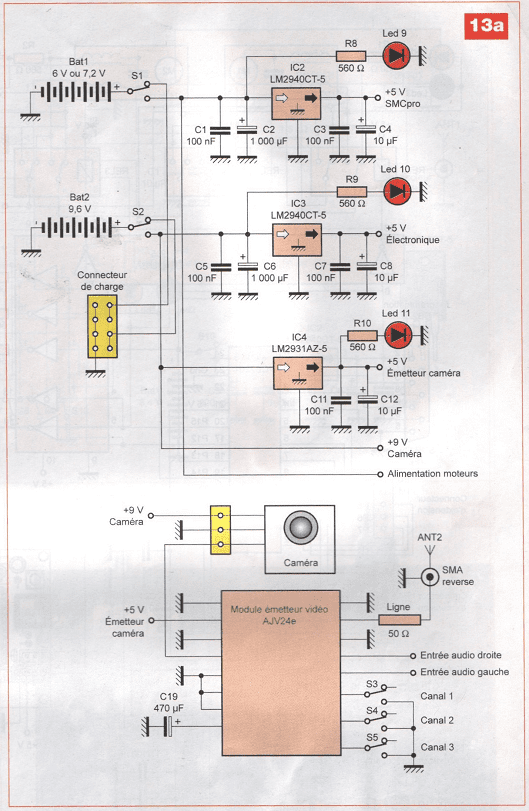
Le schéma de principe du robot explorateur est donné en figures 13a et 13b. Son alimentation est assurée par deux packs de batteries NiMh : l’un fournit une tension de 9,6 V et présente une capacité de 1 000 mAh à 1 500 mAh, tandis que l’autre doit fournir une tension de 6 V à 7,2 V et disposer d’une capacité de 2000 mAh minimum, C’est ce dernier qui est chargé d’alimenter les moteurs de propulsion, les relais et les servomoteurs (photo A). Trois régulateurs de tension à faible tension de déchet sont utilisés. Deux sont de type LM2940CT-5 et un de type LM2931AZ-5. Les deux premiers peuvent fournir un courant de 1 A et sont chargés d’alimenter l’électronique et les servomoteurs, tandis que le dernier, ne pouvant débiter qu’un courant de 100 mA, n’alimente que l’émetteur vidéo,
Cette façon de procéder, en séparant les alimentations, permet de s’affranchir au maximum des parasites électriques occasionnés par le fonctionnement des moteurs de propulsion. Ces derniers sont, malgré tout, très largement antiparasités au moyen de deux selfs et d’un condensateur.
La réception des ordres, via le module récepteur RXL2-433, émanant de la télécommande et leur interprétation, ainsi que la commande des relais et de la platine SMCpro, sont confiées à un microcontrôleur de type CB220.
Seulement cinq ports du µC sont utilisés pour la gestion du robot explorateur : les ports TX et RX et les ports P12, P13 et P14. Un circuit intégré ULN2803A (ou ULN2804A) est utilisé comme interface entre les ports ne pouvant débiter qu’un courant faible et les relais.
Tous les autres ports sont laissés libres d’utilisation afin de pouvoir éventuellement équiper le mobile de détecteurs supplémentaires.
Le port P15 est relié à l’interface de puissance et permet de disposer d’une sortie 5 V pouvant débiter un courant de 200 mA.
La platine SMCpro ne pilote que deux servomoteurs.
Six sorties sont donc libres.
Trois leds indiquent l’alimentation des relais. Quatre autres diodes, connectées deux par deux aux bornes des moteurs de Propulsion, en indiquent le sens de rotation.
La sortie RSSI du récepteur RXL2-433 commande un transistor alimentant une led.
Cette dernière permet ainsi de visualiser la réception d’un ordre par une
brève illumination. L’entrée du signal RF s’effectue sur un connecteur BNC.
Le signal vidéo (et éventuellement audio) issu de la caméra est traité par le module AJV24e et envoyé au récepteur via une antenne accordée dans la bande des 2,4 GHz, raccordée à la platine via un connecteur SMA reverse.
Une série de picots permet de déterminer l’une des quatre fréquences d’émission. Sur ces derniers, sont distribués également les entrées « audio » droite et gauche, ainsi qu’une tension continue de 9,6 V, toujours dans un souci d’évolution.
Un connecteur SUB-D femelle permet le chargement du programme dans le microcontrôleur.
La télécommande
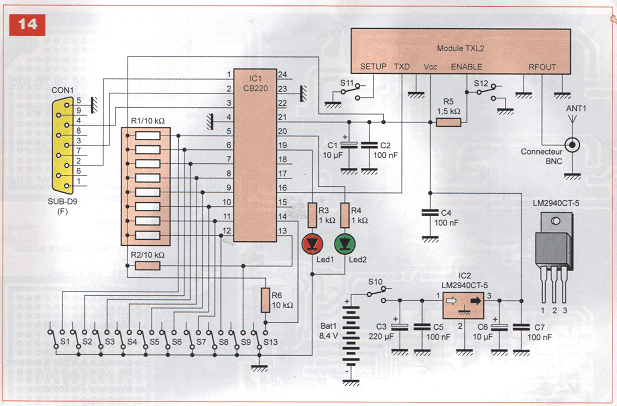
Le schéma de principe de la télécommande est donné en figure 14.
Le centre du montage est encore un microcontrôleur CUBLOC CB220.
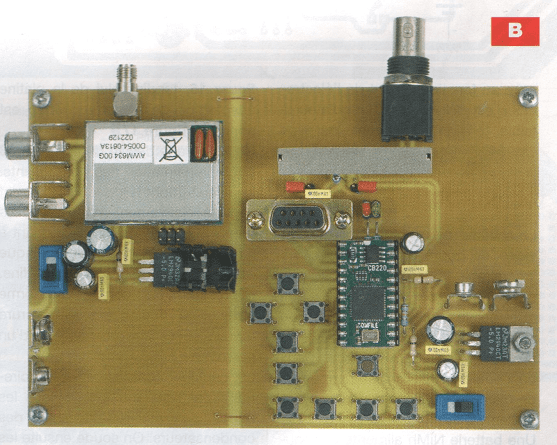
Sa fonction est d’envoyer, au moyen du module émetteur TXL2-433, des ordres séries. Les ordres sont déterminés par une pression sur l’un des dix boutons poussoirs (photo B).
Un programme très simple, dont une partie est donnée ci-dessous, gère l’activation des commutateurs en renvoyant le déroulement du pro-gramme principal à des sous-pro-grammes générant les données séries envoyées.
Opencom 1, 9600, 3, 40, 40 Do
Gosubled_P14
A=Keyin (0,10)
If A=O Then Gosub avant B=Keyin (1,10)
If B=O Then Gosub droite C=Keyin (2,10)
If C=O Then Gosub gauche D=Keyin (3,10)
If D=O Then Gosub arriere E=Keyin (4,10)
If E=O Then Gosub stop F=Keyin (5,10)
If F=O Then Gosub gauche_cam G=Keyin (6,10)
If G=O Then Gosub droite_cam H=Keyin (7,10)
If H=O Then Gosub haut_cam I=Keyin (8,10)
If 1=0 Then Gosub bas_cam J=Keyin (9,10)
If J=O Then Gosub mediane_cam Loop
Ce programme est donc facilement modifiable si l’on souhaite ajouter des fonctions supplémentaires.
Deux leds sont connectées à deux des ports du µC. L’une indique par un clignotement permanent le bon déroulement du programme, tandis que l’autre s’illumine lors de l’envoi d’un ordre.
La platine est alimentée par une batterie NiMh de 8,4 V. Le +5 V nécessaire au fonctionnement de l’électro-nique est délivré par un régulateur à faible tension de déchet (de type LM2940CT-5).
Nomenclature
LE ROBOT
Résistances
R1,R2,R3, R4,R5,R6,R8,R9,R10: 560 Ω (vert, bleu, marron)
R7 : 2,2 kΩ (rouge, rouge, rouge)
Condensateurs C1,C3,C5,C7,C11,C13,C15,C17: 100 nF
C2, C6: 1000 µF/16 V
C4, C8, C12, C14, C16, C18 : 10 µF/16 V C19 : 470 µF/16 V
Semiconducteurs T1 : BC547
LED1 à LED7 : led miniature au pas de 2,54 mm.
LED8 à LED11 : led Ø 5 mm.
IC1 : CB220 (Lextronic)
IC2, IC3 : LM2940CT-5
IC4: LM2931AZ-5
IC5 : ULN2803A ou ULN2804A
Divers
1 module émetteur AJV24e (Lextronic) 1 module caméra couleur ou N & B
1 module récepteur Radiometrix RXL2-433 (Lextronic)
1 module SMCpro (Lextronic)
2 servomoteurs
1 tourelle pour caméra (voir texte) 1 caméra couleur ou N & B
1 connecteur BNC coudé 90° pour circuit imprimé
1 connecteur SMA reverse coudé 90° pour circuit imprimé
1 antenne 433 MHz
1 antenne 2,4 GHz
2 interrupteurs inverseurs miniatures pour circuit imprimé
3 relais HB2 bobine 5V
1 châssis » Tractor » (Lextronic)
1 barrette « sécable » de supports tulipe 1 barrette « sécable» de picots
3 cavaliers
1 connecteur SUB-D 9 broches femelle coudé 90° pour circuit imprimé
1 support pour circuit intégré 18 broches 1 support pour circuit intégré 24 broches
Réalisation du robot
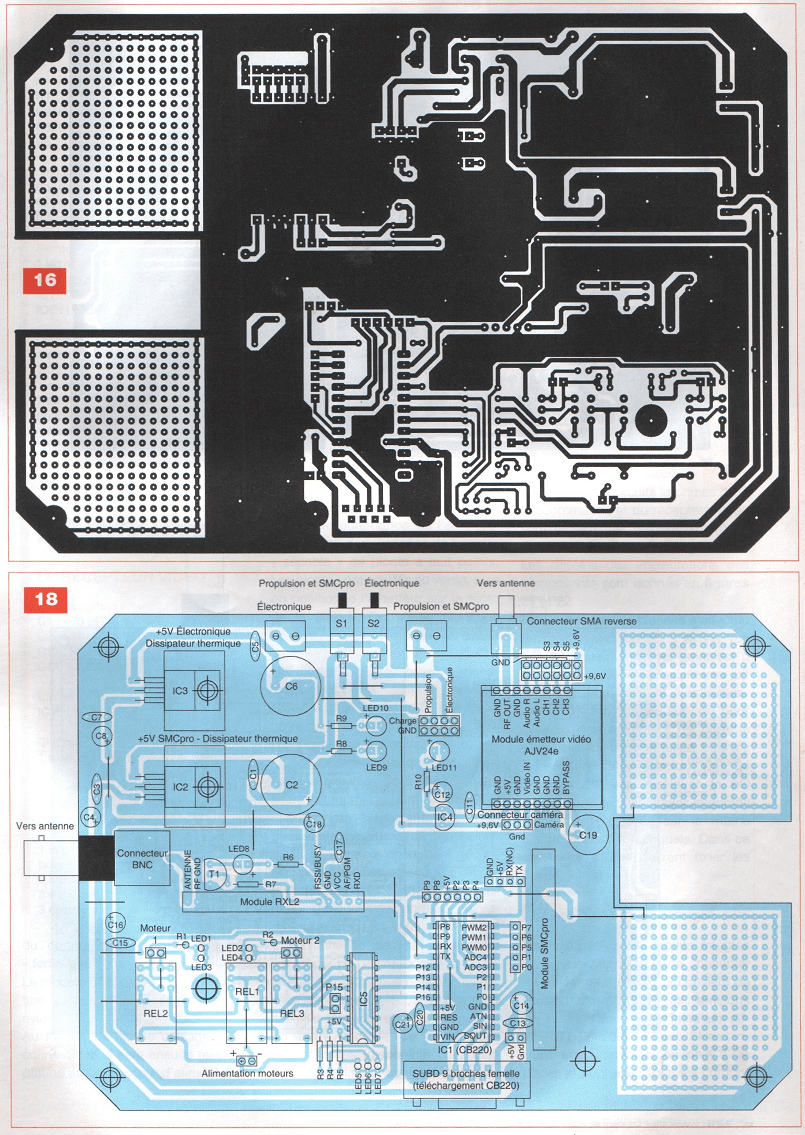
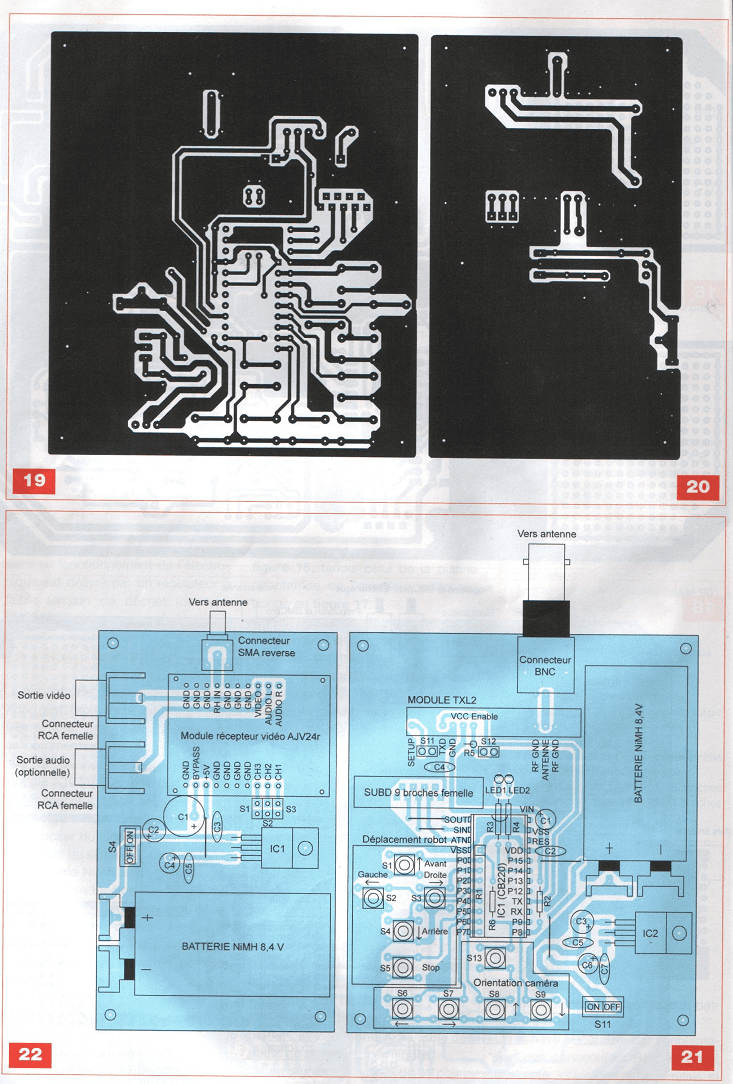
Le tracé du circuit imprimé de la platine de robot « Tractor » est représenté en figure 16, tandis celui de la platine adaptatrice de l’émetteur vidéo est donné en figure 17.
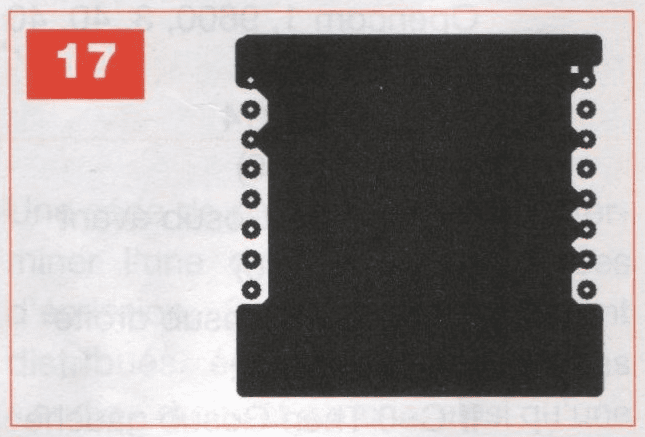
On utilisera le dessin de la figure 18 pour l’implantation des composants. Le circuit imprimé de robot « Tractor » est de taille relativement imposante, mais ne présente pas de difficulté quant à sa reproduction sur une plaque époxy, aucune piste n’étant très fine. Il présente, par contre, une forme particulière due à une échancrure rendue nécessaire au passage d’un servomoteur.
Le câblage commence obligatoirement par l’implantation de tous les straps, puis des résistances et des condensateurs. On soude ensuite les supports des circuits intégrés et tous les connecteurs. Ces derniers sont constitués pour les ports supplémentaires, la sélection du canal vidéo d’émission et de charge des accumulateurs de morceaux de barrette « sécable » de picots.
Les deux régulateurs de tensions en boîtier TO220 sont fixés sur des petits dissipateurs thermiques.
Deux borniers à vis à deux points permettent le raccordement des batteries à la platine.
On achève le câblage par l’implantation des connecteurs BNC et SMA, des deux interrupteurs, des relais et du connecteur SUB-D 9 broches « femelle »,
Le module SMCpro est fixé sur la platine à l’aide d’une petite équerre en nylon.
Au moyen de fils de câblage et de connecteurs, il sera ensuite relié à la platine au connecteur d’alimentation « +5 V, GND » et à celui de transmission des données » G D, +5V, RX (N.C.), TX », Seules les connexions « TX » et « GND » doivent être réalisées.
La platine adaptatrice de l’émetteur vidéo reçoit deux rangées de barrette « sécable » de picots à huit points. Les picots sont soudés au verso, puis on positionne l’émetteur sur le recto de la platine. On soude alors les extrémités des picots sur le circuit imprimé de l’émetteur.
Nous avons utilisé, pour la mécanique du robot, un châssis commercialisé appelé Tractor (d’où le nom de notre mobile). Il est livré prêt à l’emploi pour un prix avantageux.
La seule partie à fabriquer est la platine (en plexiglas de 3 mm. d’épaisseur maximum) qui sera vissée sur le châssis. Les trous sont déjà pratiqués. Cette platine est de dimensions telles qu’elle doit légèrement dépasser des chenilles en largeur et au minimum de deux centimètres la longueur du circuit imprimé. Le servomoteur supportant la tourelle est fixé à la platine de plexiglas en utilisant les quatre vis de son boîtier.
Note. La tourelle que nous avons utilisée n’est, semble-t-il, plus commercialisée. On pourra la remplacer par un autre modèle de dimensions approchantes (disponible chez Lex-tronic), soit la fabriquer soi-même.
La télécommande et le récepteur vidéo
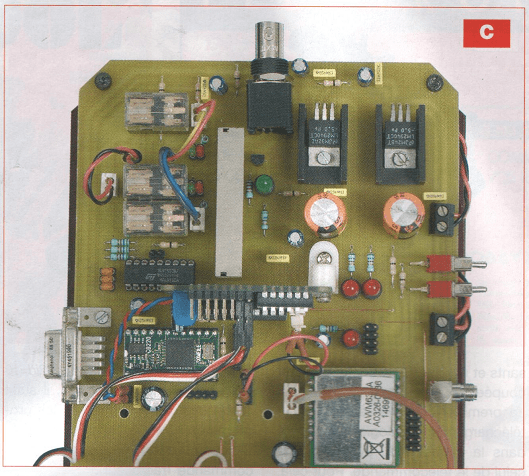
Les tracés des circuits imprimés de la télécommande et du récepteur vidéo sont représentés respectivement en figures 19 et 20.
Les dessins des implantations des composants sont donnés en figures 21 et 22.
Le câblage de ces platines s’effectue de la manière que nous avons vue précédemment. Un seul point est à signaler: le réseau de résistances est situé sous le µC CB220. Il est nécessaire d’utiliser, comme support pour celui-ci, des morceaux de barrette « sécable » de support tulipe, puis d’y insérer un autre support DIL 24 broches afin de surélever le µC (photo B). Les deux circuits imprimés peuvent être gravés sur la même plaque et laissés tels quels. Dans ce cas, deux straps devront relier les plans de masse.
Les essais
Avant d’insérer les circuits intégrés dans leurs supports et de connecter les différents modules, il convient de vérifier que toutes les tensions nécessaires sont disponibles aux différents points des platines. Si les tensions sont correctes, on peut alors placer et connecter tous les composants et modules (l’alimentation étant coupée).
La première chose à réaliser est le téléchargement du logiciel du robot explorateur dans la mémoire du µC, ainsi que celui de la télécommande. Pour cela, il convient de disposer du logiciel Cubloc Studio disponible en téléchargement sur les sites internet http://cub/oc. com/data/O 1.php et http://www./extronic.fr/produit.php?id= 10 Après installation du logiciel, il suffit de télécharger sur notre site les programmes Tractor.cul, Tractor.cub, télécommande Tractor.cul et télécommande Tractor.cub.
Pour finir, en lançant le logiciel Cubloc Studio et en chargeant les programmes (.cul) dans l’éditeur, on peut télécharger les programmes dans les µC après avoir connecté platines au port série du PC.
On peut alors passer à la phase des essais en reliant le récepteur vidéo à l’entrée d’un téléviseur ou d’un moniteur. Ensuite, on vérifie que la pression sur chacun des poussoirs a résultat la réception d’un ordre par le robot explorateur. Si le déplacement de celui-ci ne correspond pas aux touches pressées, il convient de vérifier la polarité des moteurs.
Note. À la mise sous tension, module SMCpro positionne tous les servomoteurs au neutre. Nous avons constaté, sur notre prototype, que le servo qui supporte la tourelle « frétille» autour du neutre. Il suffit de toucher pour que cesse cette anomalie. Si cela se produisait sur votre réalisation, il suffirait de coller un morceau de mousse assez dure sur la platine époxy et ce, de chaque côté du servomoteur afin que la base de la tourelle frotte légèrement dessus (photo D).
P.OGUIC


0 commentaire
Leave a comment


Articles récents





Articles les plus vus





Articles plus commentés

Scroll to Top