
BOT120 Le robot PICAXE-20X2 en kit
Nous vous présentons un robot de petite taille, presqu’un bijou, aux innombrables possibilités, construit autour du microcontrôleur PICAXE-20X2, désormais bien connu de nos lecteurs. Une fois n’est pas coutume, vous n’aurez pratiquement pas besoin de votre fer, seulement quelques composants à souder pour les périphériques.
Il s’agit d’un kit conçu par la société australienne Microbric et distribué en France par Gotronic, notre revendeur spécialisé en matière de PICAXE.
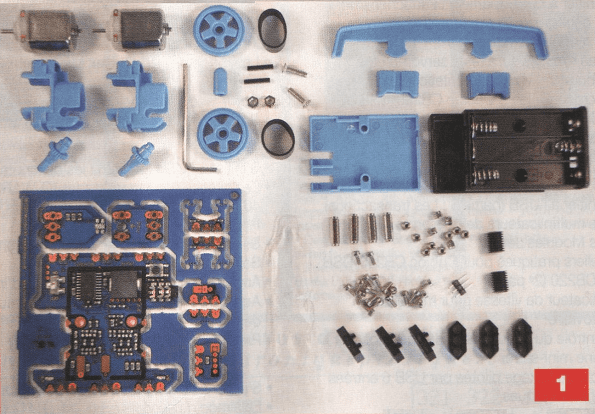
La figure 1 montre le contenu du kit très complet, bien pensé, mais comportant une notice en anglais. Le présent article tient lieu de notice française et bien plus encore, car nous étudierons le montage, la programmation en Basic et les particularités permettant de tirer le maximum de ce superbe robot, avec douze programmes développés par nos soins.
Nous détaillerons également la manière de créer un circuit, sans limites et reconstructible à loisir, où le faire évoluer en suivant une ligne noire. Même, si nous n’étudions pas cette possibilité, sachez qu’il peut également se programmer en mode diagrammes (Flowchart).
Présentation
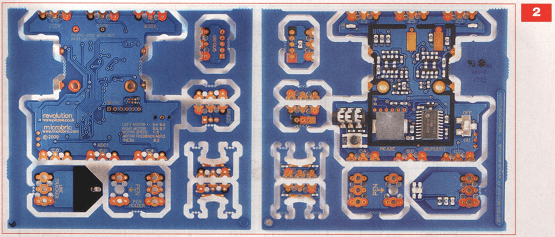
La platine électronique «double face», recto/verso, équipée de composants de surface (CMS) est présentée en figure 2. Notez que les différents modules sont déjà prédécoupés. Il suffit de les séparer, comme cela se pratique sur n’importe quelle maquette de modèle réduit. Aucun soudage à prévoir! Du côté mécanique, tout est fourni, même la clé BTR miniature et le lubrifiant pour les pignons.
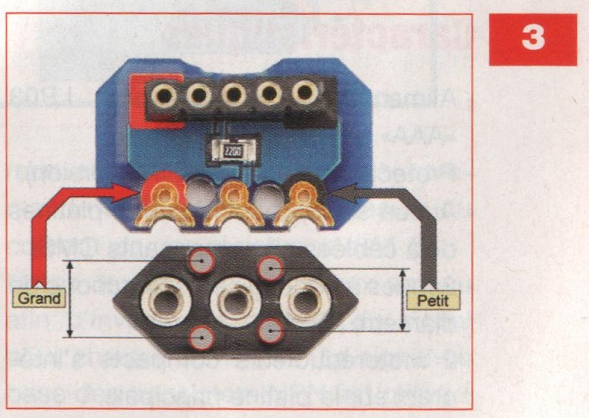
Les accessoires (périphériques) prennent place autour de la carte mère, selon un astucieux principe mis au point par la société Microbric. Comme
le montre la figure 3, une petite brique en plastique, munie de détrompeurs, assure la liaison mécanique. Trois vis fixent le tout et servent de raccordements électriques (+4,5 V, signal et masse). De cette manière, il est possible de modifier à votre guise l’aspect et les capacités de votre robot.
En version de base, le robot BOT120 permet déjà de bien s’initier à la programmation et à la robotique.
Le robot est livré avec deux motoréducteurs pour les déplacements, le boîtier de piles, un buzzer piézo pour générer les sons, deux leds pour les «yeux», un module optique suiveur de ligne, un pare-chocs à deux contacts (droit et gauche), une touche (bouton-poussoir) à usage libre, un support de stylo, un connecteur pour servomoteur et l’embase de programmation pour le câble USB dédié (AXE027).
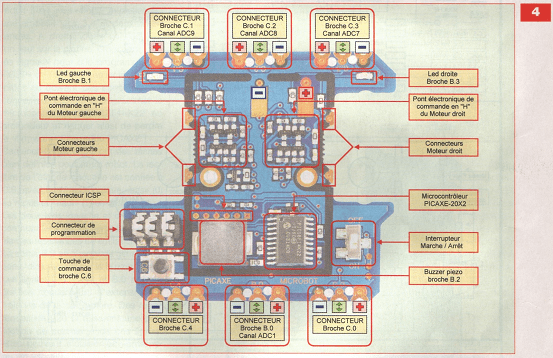
La photo commentée de la figure 4 donne le repérage des différents éléments constitutifs de la carte mère. Nous lui avons adjoint le kit BOT121 donnant accès à l’infrarouge et à la détection de la lumière. A cela, il convient de se procurer la télécommande IR / TVR010, un module ultra-sonique SRF005 et un servomoteur pour exploiter la majeure partie des possibilités de BOT120.
Caractéristiques
– Alimentation par trois piles LR03 «AAA » de 1 ,5 V.
– Protection par MOS-FET (inversion).
– Aucun soudage, ni réglage: platines
déjà câblées en composants CMS.
– 2 roues à bandage en caoutchouc de diamètre 27 mm.
– 2 motoréducteurs compacts s’intégrant sur la platine principale.
– 2 leds de signalisation, 1 touche et 1 buzzer piézo intégrés.
– Interrupteur M/A et embase de programmation sur la plaque principale. – Module optique suiveur d’une ligne noire.
– Détection d’obstacles par contacts droit et gauche.
– Évolution dans tous les sens, grâce aux moteurs commandés par des ponts en H.
– Possibilité de commander un servomoteur (non fourni).
– Possibilité de monter un module ultrasonique SRF005 (non fourni).
– Possibilité d’agir avec une télécommande IR (kit 80T121 et télécom-mande TVR01 0).
– Possibilité d’émissions IR à droite et à gauche (kit 80T121).
– Possibilité de détections de la lumière à droite et à gauche (kit 80T121).
Schéma de principe
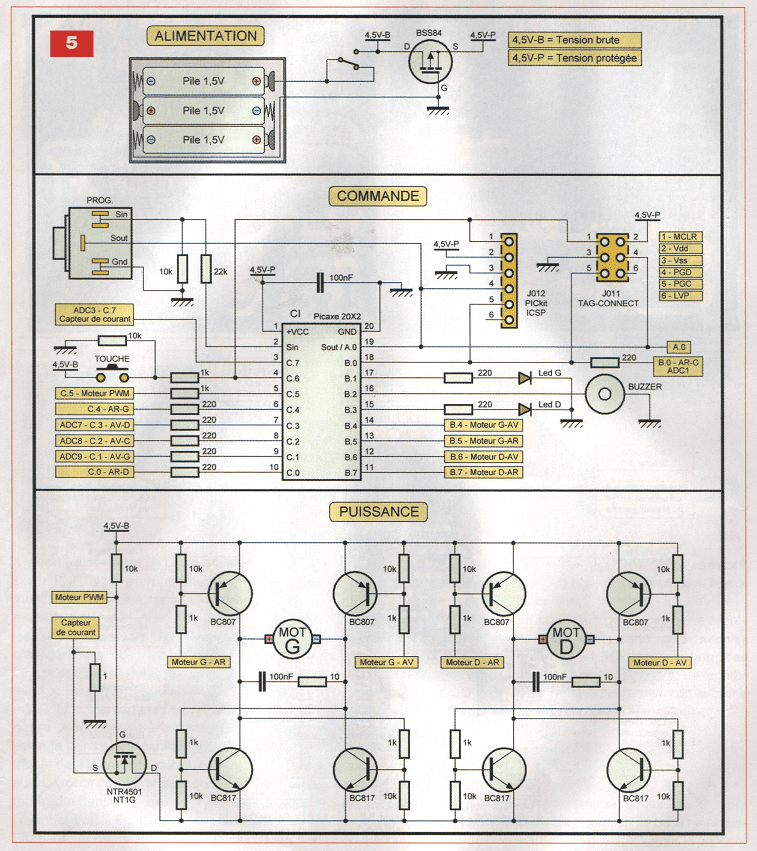
La figure 5 décrit les circuits supportés par la carte mère. Nous voyons la section «alimentation».
Après l’interrupteur «Marche / Arrêt », nous obtenons une tension brute de 4,5 V. Le transistor MOS-FET assure une astucieuse protection anti-inversions, afin de fournir une tension protégée de 4,5 V.
Le cœur de notre robot est confié au microcontrôleur PICAXE-20X2.
Le circuit de programmation est réduit à sa plus simple expression : une embase jack 3,5 et deux résistances. A droite, deux connecteurs (un seul sur la platine) proposent tous les signaux pour une programmation <<lCSP» du PICAXE. Les lecteurs non¬initiés ne doivent pas considérer ce connecteur destiné à programmer le microcontrôleur PIC 18F14K22 en profondeur et risquer ainsi de perdre le «firrnware» interne du PICAXE ! Certaines lignes d’EiS ont des tâches bien définies pour notre robot. La lecture de l’état de la touche est confiée à C.6, avec un niveau logique «bas» (0) au repos et «haut» (1) en action.
Les deux leds, gauche et droite, sont commandées par les sorties B.1 et B.3 via des résistances de limitations.
La sortie B.2 se charge de générer les sons, directement sur le buzzer piézo. Les lignes C.O à CA et B.O arrivent sur les connecteurs d’extensions à trois vis de la carte mère. Des résistances de 220 Q assurent une protection de surcharge de ces lignes. Elles peuvent s’utiliser en «entrées» ou en «sorties». De plus, il est pos¬sible de lire des signaux analogiques sur C.1, C.2, C.3 et B.O ou de com¬mander un servomoteur via B.O.
Les lignes BA à B.7 ont pour tâche de gérer les déplacements des deux moteurs dans les deux sens de rotation. La vitesse des moteurs s’obtient en positionnant C.5 en «entrée» (grande vitesse), ou en «sortie» (vitesse lente). Les programmeurs initiés pourront mesurer la puissance consommée par les moteurs via l’entrée analogique C.7. Nous n’utiliserons pas cette fonction dans cet article, déjà assez conséquent.
La partie «puissance» comporte deux circuits en H, un pour chaque moteur, ainsi qu’un transistor MOS-FET commun aux deux ponts pour la commande de la vitesse et la mesure du courant via une résistance de 1 Q. Notez le principe astucieux retenu afin d’inverser la polarité du signal pour chaque demi pont. Le signal de base des transistors NPN est prélevé à la sortie (collecteur) de chaque transistor PNP. Nous verrons ultérieurement le protocole de commande des moteurs. Les résistances de 10 Ω et les condensateurs de 100 nF servent d’antiparasites.
La figure 6 montre les différents capteurs et l’aspect physique de la carte mère. Tous les capteurs et périphériques se raccordent à la carte mère selon le principe mécanique et électrique de «Mlcrobric- décrit ci-des¬sus. Le robot comporte trois connecteurs d’extensions de ce type à l’avant et trois à l’arrière.
En haut, nous voyons les circuits fournis avec le kit de base 80T120.
Nous avons deux circuits identiques pour les pare-chocs : un simple contact souple force le signal au niveau logique 1 en cas de heurt.
Le capteur à réflexion est composé d’une led rouge alimentée en permanence et d’un phototransistor chargé de renvoyer une grandeur variable en fonction de l’éclairement reçu. La valeur est lue par le canal analogique ADC8 présent sur C.2 à l’avant et au centre du robot. Le connecteur destiné au servomoteur peut également s’employer pour y raccorder le capteur ou actionneur de votre conception. Le connecteur du capteur ultra¬sonique ne comporte qu’une simple résistance de protection. Le module SRF005 n’est pas fourni avec le kit, vous devrez l’acquérir séparément chez Gotronic, par exemple. Attention au sens lors de son insertion sur le connecteur, en cas d’erreur vous inversez les polarités de l’alimentation (voyez le schéma) !
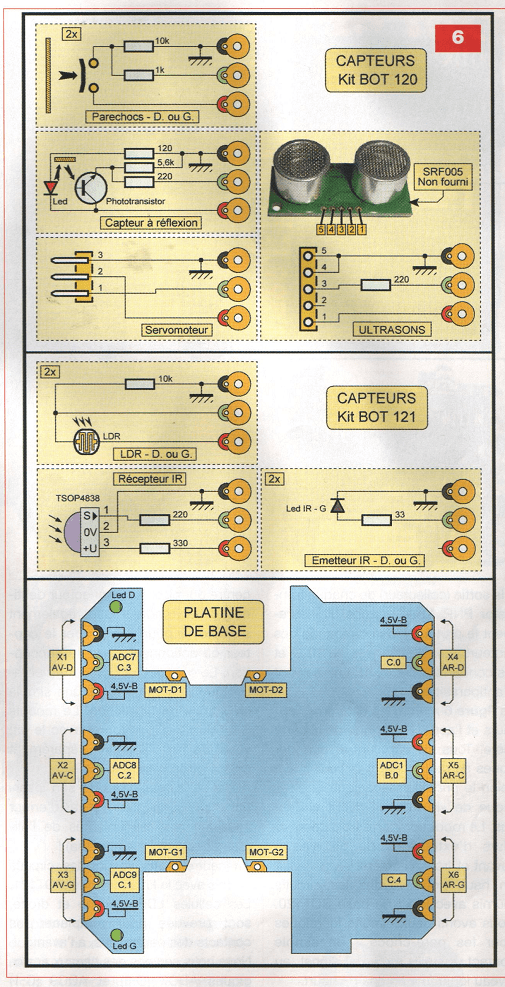
Au centre, nous voyons les circuits fournis avec le kit additionnel 80T121. Les cellules LOR, gauche et droite, sont prévues pour remplacer les contacts des pare-chocs, à l’avant. Nous nous servons des canaux analogiques AOC? (C.3) et ADC9 (C.1) pour lire le niveau d’éclairement de chaque côté. Le récepteur infrarouge TSOP4838 s’utilise soit avec la télé-commande habituelle des PICAXE (TVR010), soit en combinaison avec les émetteurs IR du kit. Ces derniers s’utilisent avec l’instruction basic chargée d’envoyer le code voulu au récepteur. Il s’agit du protocole des téléviseurs Sony.
En bas, vous pouvez voir une représentation de la carte mère avec les polarités et la dénomination des connecteurs d’extensions. Le repérage s’effectue en fonction de la forme de la carte (avant ou arrière).
Montage du robot
Préparation
Comme précisé ci-dessus, le robot 80T120 en version de base ne nécessite aucun soudage, hormis le connecteur SIL à trois broches pour l’éventuel servomoteur. Avant de commencer et de manipuler la carte à microcontrôleur, veillez à ne pas porter des vêtements chargés en électricité statique. Détachez délicatement toutes les pièces du circuit imprimé prédécoupé par simples flexions hautes et basses. Pour l’esthétique et si vous possédez de toutes petites limes fines, ébavurez chaque circuit, avec précautions. Les lecteurs ayant acquis le kit complémentaire BOT121 représenté à la figure 6, doivent effectuer la même opération avant de souder les quelques composants (résistances, capteur IR, leds et LOR).
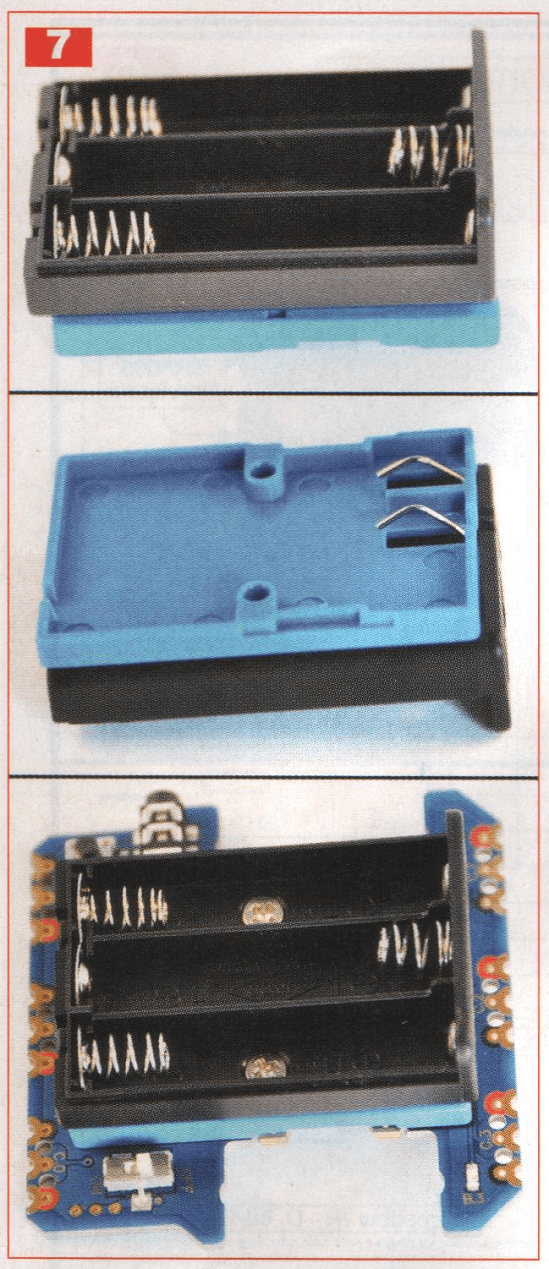
Le boitier des piles (figure 7)
Il prend place au dessus du buzzer et du microcontrôleur.
1- Placez le support noir sur la plaque entretoise bleue bien positionnée (voir photo).
2- L’ensemble est maintenu sur la carte mère par deux vis et écrous convenablement serrés. Les liai-sons électriques s’effectuent par simples contacts appuyés sur le circuit imprimé.
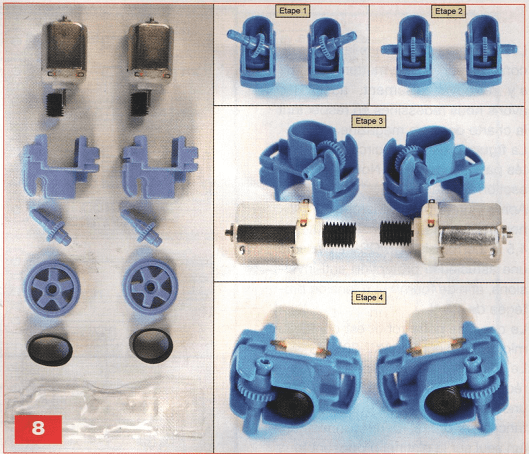
Les motoréducteurs (figure 8)
1- Positionnez les couronnes dentées dans chaque carter en veillant au
sens.
2- Exercez une pression vers le bas sur la partie de l’axe qui dépasse jusqu’à l’emboîtement. Contrôlez la libre rotation du pignon.
3- Enfoncez les vis «sans fin» sur les axes des moteurs. Pour cette opération, mettez bien en appui l’arrière de l’axe du moteur sur une surface dure, afin de ne pas détériorer le collecteur et les balais internes sous la pression.
4- Insérez complètement chaque moteur, muni de sa vis sans fin, dans son carter. Les connexions électriques doivent se trouver du côté de l’arbre court du pignon. A partir de maintenant, n’essayez plus de tourner la couronne den¬tée, mais vérifiez le fonctionne¬ment en tournant manuellement la vis «sans fin», puis en alimentant le moteur sous une tension de 3 V.
5- Relevez légèrement les lamelles en cuivre, car les liaisons électriques s’effectueront par de simples contacts maintenus sur la carte
mère.
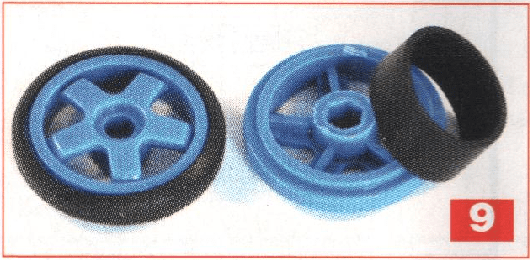
6- Placez les bandages en caoutchouc autour des roues comme le montre la figure 9.
7 – Insérez, en force, chaque roue dans l’axe de sortie du motoréducteur. Veillez à conserver environ 2 mm de jeu entre le carter et la roue. Faîtes un test électrique sous 3 V, le mécanisme doit tourner librement.
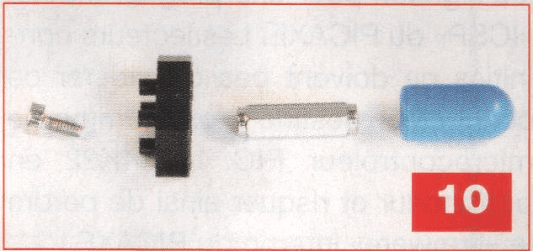
Le pied arrière (figure 10)
1- Enfoncez le «capuchon» bleu sur l’entretoise et celle-ci dans le trou central d’une brique noire.
2- Vissez le tout sur le connecteur d’extension de la carte mère, à l’arrière et au centre (B.O), en utilisant le circuit du connecteur pour servomoteur. Il faut toujours un circuit annexe pour maintenir une brique noire avec ses trois vis. Attention au sens du montage, observez la figure 3.
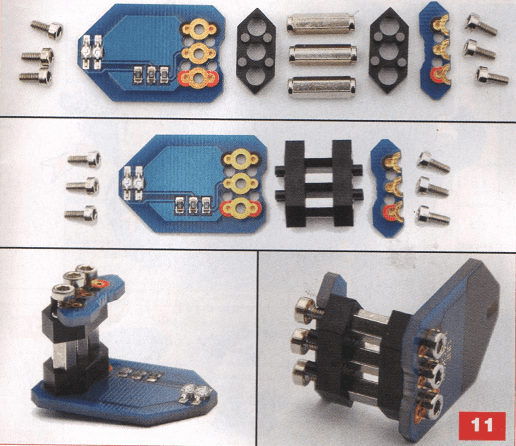
Le module optique suiveur de ligne (figure 11)
1- Préparez tous les éléments.
2- Assemblez les briques noires, en respectant leur sens (plus grand écart vers la borne rouge), sur les trois entretoises filetées.
3- Emboîtez l’ensemble ainsi obtenu sur le circuit optique, en bas et sur le circuit complémentaire, en haut.
4- Ne serrez pas les vis supérieures, il faudra les ôter pour mettre le module en place sur la carte mère.
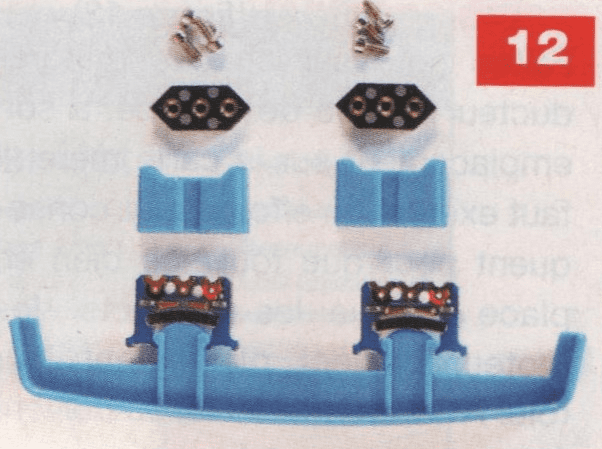
Les pare-chocs (figure 12)
1- Préparez tous les éléments.
2- Les deux petites barres rectangulaires, en caoutchouc, de section carrée, sont des conducteurs électriques qui serviront à établir un contact en cas de choc. Insérez¬les dans leur logement respectif au centre des petits circuits imprimés.
3- Placez ensuite, délicatement, la barre du pare-chocs en plastique bleu devant, sans faire bouger les barres rectangulaires précédentes. Veillez à respecter le sens : les rainures du pare-chocs et les résistances du circuit imprimé au dessus.
4- Les deux caches en plastique bleu doivent englober chaque circuit imprimé pour maintenir l’en¬semble. Les rainures doivent toujours se trouver au dessus.
5- Emboîtez les briques noires, dans le bon sens, pour éviter que ce bel assemblage ne se démonte.
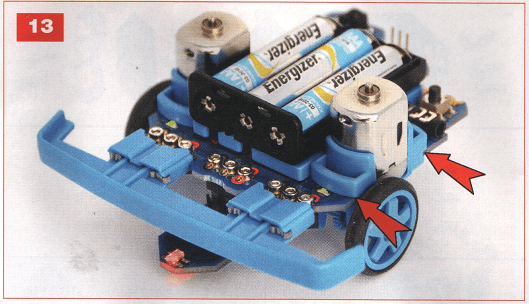
Assemblage final (figure 13)
1- Faîtes coulisser chaque motoréducteur équipé de sa roue, à son emplacement sur la carte mère. Il faut exercer un effort assez conséquent pour que tout soit bien en place et que les contacts des moteurs jouent pleinement leur rôle. Attention! Les roues doivent être orientées vers l’avant.
2- Vissez le pied arrière avec son petit circuit.
3- Fixez le module optique « suiveur de ligne» à l’aide de ses trois vis.
4- Mettez en place le pare-chocs et serrez ses six vis de maintien.
5- Si les briques en plastique noir sont bien orientées et bien emboîtées, les modules ou circuits reliés à la carte mère ne doivent présenter aucun jeu. Sur chaque connecteur, les couleurs identiques sont en regard.
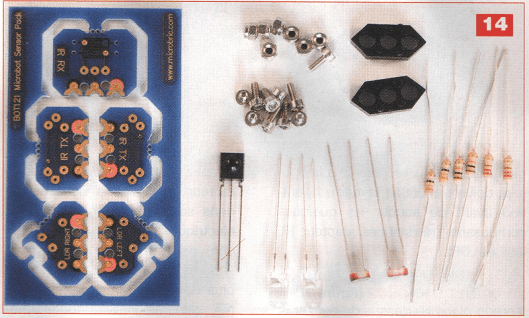
Le kit d’extension B0T121 (figure 14)
Le câblage des cinq petits circuits ne présente aucune difficulté, les composants à souder sont sérigraphiés. Seules les leds IR peuvent prêter à confusion, il convient de bien observer leur sens. Le récepteur infrarouge TSOP4838 se soude au-dessus et les deux résistances au-dessous.
La mise en place de ces modules obéit aux mêmes règles que précédemment, nous verrons l’utilisation de certains d’entre eux lors du para¬graphe dédié à la programmation.
Programmation
Généralités
Comme nous l’avons précisé, nous n’étudierons que la programmation en Basic, car ce mode permet de comprendre en profondeur la structure et les principes de la programmation. La puissance de ce langage, adapté aux microcontrôleurs PICAXE, offre d’in-nombrables possibilités et une puissance accrue par rapport au mode «Flowchart».
Pour programmer les PICAXE, il convient d’acquérir le câble USB spécifique (AXE027).
L’environnement est totalement gratuit, il suffit de télécharger le logiciel
sur Internet. Il existe deux logiciels au choix, que vous pourrez télécharger à partir des liens donnés en fin d’article.
– « PICAXE Programming Editor».
Convient uniquement pour WIN-DOWS.
– « AXEpad». Est prévu pour WIN-DOWS, mais également pour Mac et Linux.
Nous travaillons avec le premier. Pour le franciser, il suffit d’ouvrir le sous-menu « Options» du menu « View», de sélectionner l’onglet « Langage» et de cliquer sur « French» avant de valider par « Ok».
Nous considérons qu’il est maintenant installé sur votre ordinateur.
Sur le site Internet du magazine, télé-chargez les fichiers Basic des pro-grammes développés par nos soins pour tester les fonctions du robot et le faire évoluer. De nombreux commentaires permettent de s’y retrouver dans le code « source». Les lecteurs n’ayant pas l’opportunité de se connecter à Internet peuvent obtenir notre fichier en envoyant à la rédaction un CDROM sous enveloppe auto-adressée suffisamment affranchie.
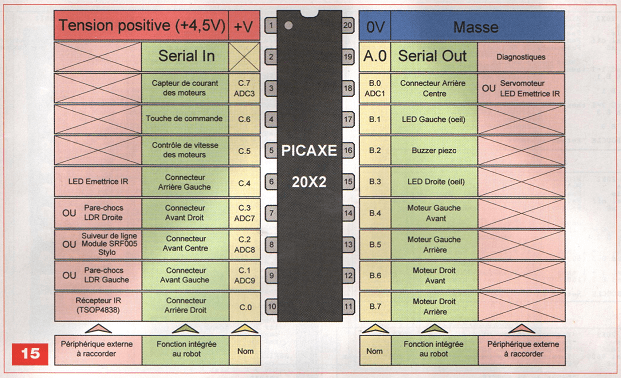
La programmation s’effectue ensuite très simplement par le port USB, au moyen du cordon AXE027 reliant votre ordinateur au robot. Lancez le logiciel « PICAXE Programming Editor». Dans la fenêtre d’options qui s’ouvre automatiquement, sélection¬nez le microcontrôleur PICAXE-20X2 et sur l’onglet suivant: le port « sériel» utilisé (celui-ci est émulé à partir du port USB). Ouvrez le fichier Basic à charger en mémoire du robot, met¬tez-le sous tension et lancez la compilation suivie du chargement (dernière icône «Proqram» sous la barre des menus). Une fois le programme mis en mémoire, il y restera jusqu’au chargement du suivant, même en cas de coupure prolongée du courant. Toutes les lignes d’E/S du microcontrôleur ne peuvent pas être utilisées à loisir, certaines sont dédiées à des tâches spécifiques, d’autres sont laissées libres mais présentent des restrictions. La figure 15 montre le brochage du PICAXE-20X2, le nom de chaque broche, sa fonction et son utilisation au sein du robot BOT120. Nous avons développé huit pro-grammes simples, destinés à tester toutes les fonctions essentielles. Pour chacun d’eux, nous donnons la configuration nécessaire du robot, fournis-sons une figure du code source Basic et étudions le principe. Vous maîtrise-rez ainsi les bases et pourrez aborder nos quatre applications sophistiquées donnant, à votre robot, un comporte-ment presque vivant. Nous ne pourrons pas entrer dans les détails de ces programmes, mais les nombreux commentaires vous permettront de vous y retrouver sans peine.
Programme de test des fonctions du robot
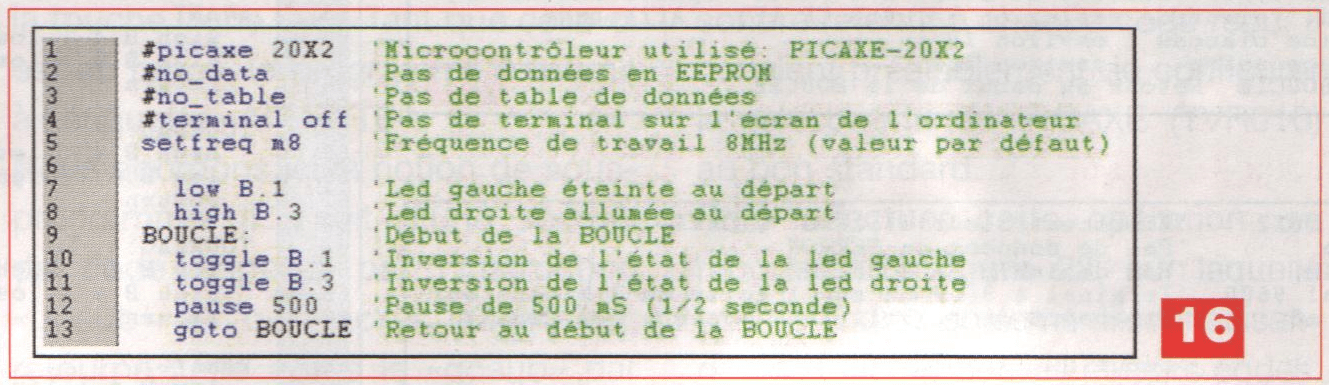
Test des leds (figure 16).
Base BOT120 seule (photo A).
Les lignes 1 à 5, bien qu’optionnelles, permettent un chargement plus rapi¬de en mémoire et configurent le PICAXE.
La fréquence de travail choisie est de 8 MHz (nous prenons toujours, ici, la fréquence par défaut du PICAXE-20X2). C’est elle qui règle les pauses et bien d’autres instructions. Dans certains cas, il faut définir la vitesse de communication entre le terminal de l’ordinateur et le PICAXE.
Ce programme n’utilise pas cette fonction, nous l’inhibons.
Hormis la directive gérant le terminal, ces cinq lignes étant pratiquement communes à tous nos programmes, nous ne les détaillerons plus.
Au départ, la led gauche est éteinte et la droite illuminée.
Ensuite, nous entrons dans une boucle sans fin commutant simultanément l’état des sorties B.1 et B.3, donc l’illumination des leds, toutes les demi-secondes (500 ms).
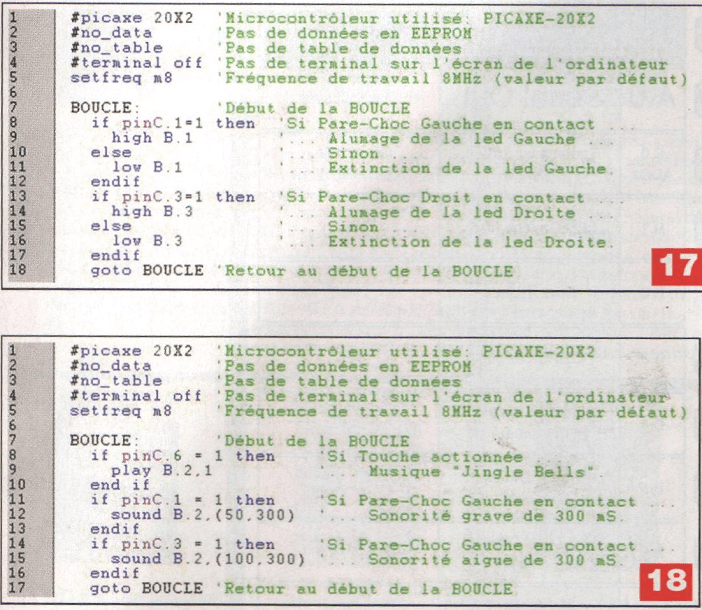
Test des pare-chocs (figure 17)
Base BOT120 seule (photo A),
Nous gardons, comme toujours, le principe de la boucle sans fin. Nous testons l’état du contact gauche du pare-chocs (ligne C.1), S’il est actionné, la led gauche B.1 s’illumine, sinon elle reste éteinte.
Nous analysons ensuite, sur le même principe, l’état du contact du pare-chocs droit (ligne C,3) pour gérer la led droite B,3.
Test du buzzer piézo (figure 18).
Base BOT120 seule (photo A).
Dans la boucle, nous effectuons trois tests successifs, Si la touche (ligne C.6) est actionnée, le robot joue mélodie (Jingle Belis).
En cas de heurt du pare-chocs gauche (ligne C.1), un bip sonore grave de 300 ms retentit.
Pour un contact à droite {ligne C.3) le bip sonore de 300 ms est aigu.
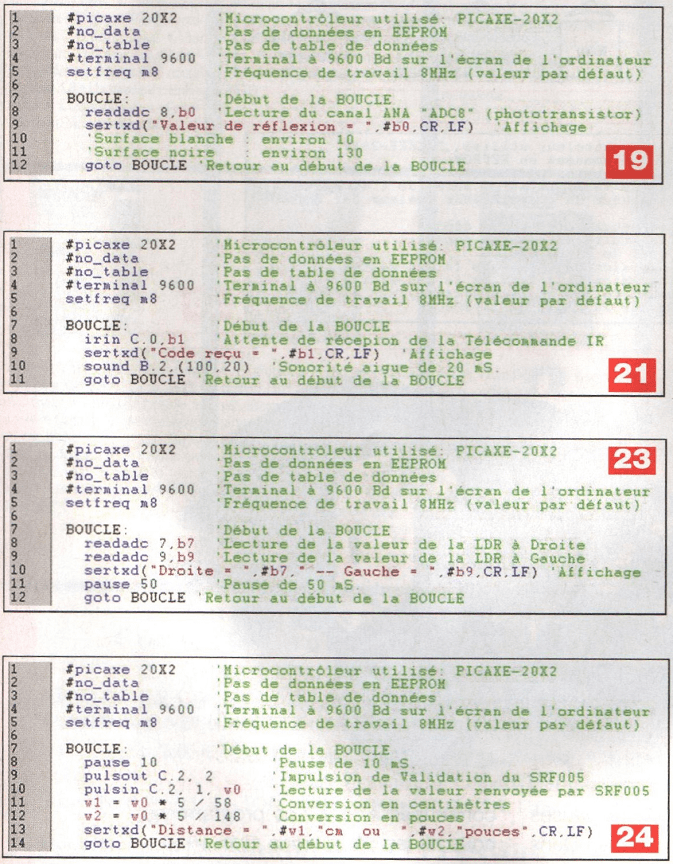
Test du module optique (figure 19).
Base BOT120 seule (photo A).
Le module optique du suivi d’une ligne noire se compose d’une led et d’un phototransistor. En fonction du niveau de réflexion, celui-ci renvoie une valeur différente qu’il convient de lire via le canal ADC8 du convertisseur analogique/numérique.
Cette donnée est mémorisée dans la variable b0 et affichée sur l’écran de l’ordinateur en temps réel.
Ce processus est inclus dans une boucle sans fin pour une lecture permanente. La directive du terminal doit préalablement être configurée en 9600 Bds.
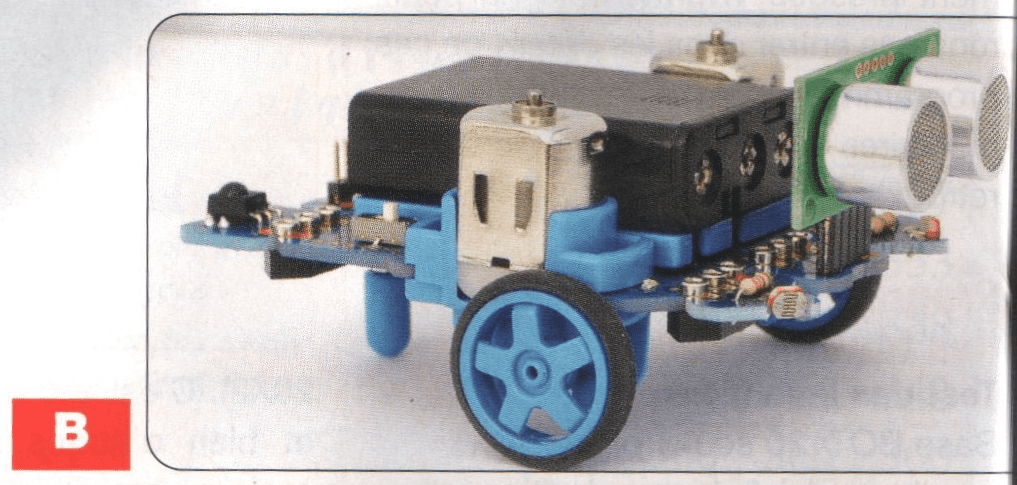
Test des motoréducteurs (fig. 20).
Base BOT120 seule (photo A).
La ligne C.5 détermine la vitesse des moteurs : lente lorsqu’elle est configurée en «sortie» ou rapide si, comme ici, elle est positionnée en «entrée».
La suite du déroulement du programme est conditionnée par l’action sur la touche (ligne C.6). Tant que celle-ci est au repos, le programme retourne à l’étiquette «ATTENTE».
Nous abordons ici la notion de sous-programme. Il s’agit d’une section de code appelée par l’instruction «gosub» et qui, après exécution, retourne juste après le «gosub» par l’instruction «return».
Ce principe clarifie le programme et le rend bien plus lisible qu’avec l’emploi de multiples «goto», surtout lors de l’appel régulier d’un même sous-programme.
La boucle sans fin fait exécuter, en permanence, au robot, tous les déplacements possibles entrecoupés de temps de pauses.
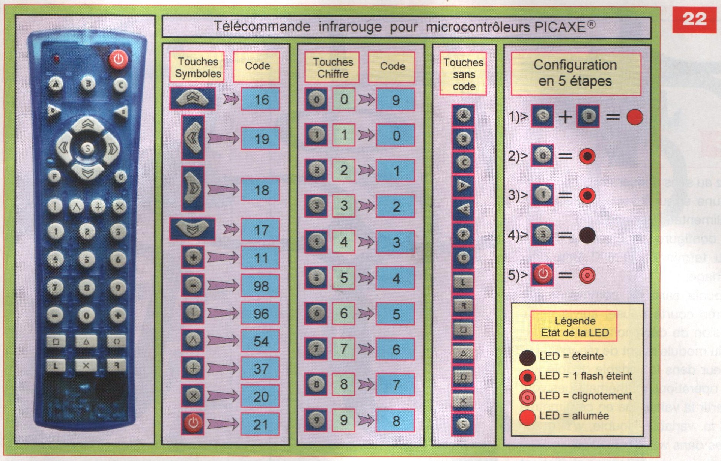
Test de la télécommande IR (fig. 21).
Kits BOT120 et BOT121 (photo B). Le module de réception infrarouge TSOP4838, câblé, doit prendre place à l’arrière du robot sur la ligne C.O. Nous configurons la directive du ter¬minai à 9 600 Bds pour voir les don¬nées s’afficher sur l’écran de l’ordina¬teur. Dans la boucle sans fin, l’instruction «irin» attend un code émis par la télécommande infrarouge au standard des téléviseurs Sony.
Dès réception, il est mémorisé dans la variable b1 et affiché. Un bref bip sonore retentit à chaque code reçu. Il convient préalablement de configurer la télécommande PICAXE (lVR010) au bon standard.
Pour effectuer cette opération, se reporter à la figure 22, sur laquelle vous prendrez également connaissance des touches actives et leurs codes.
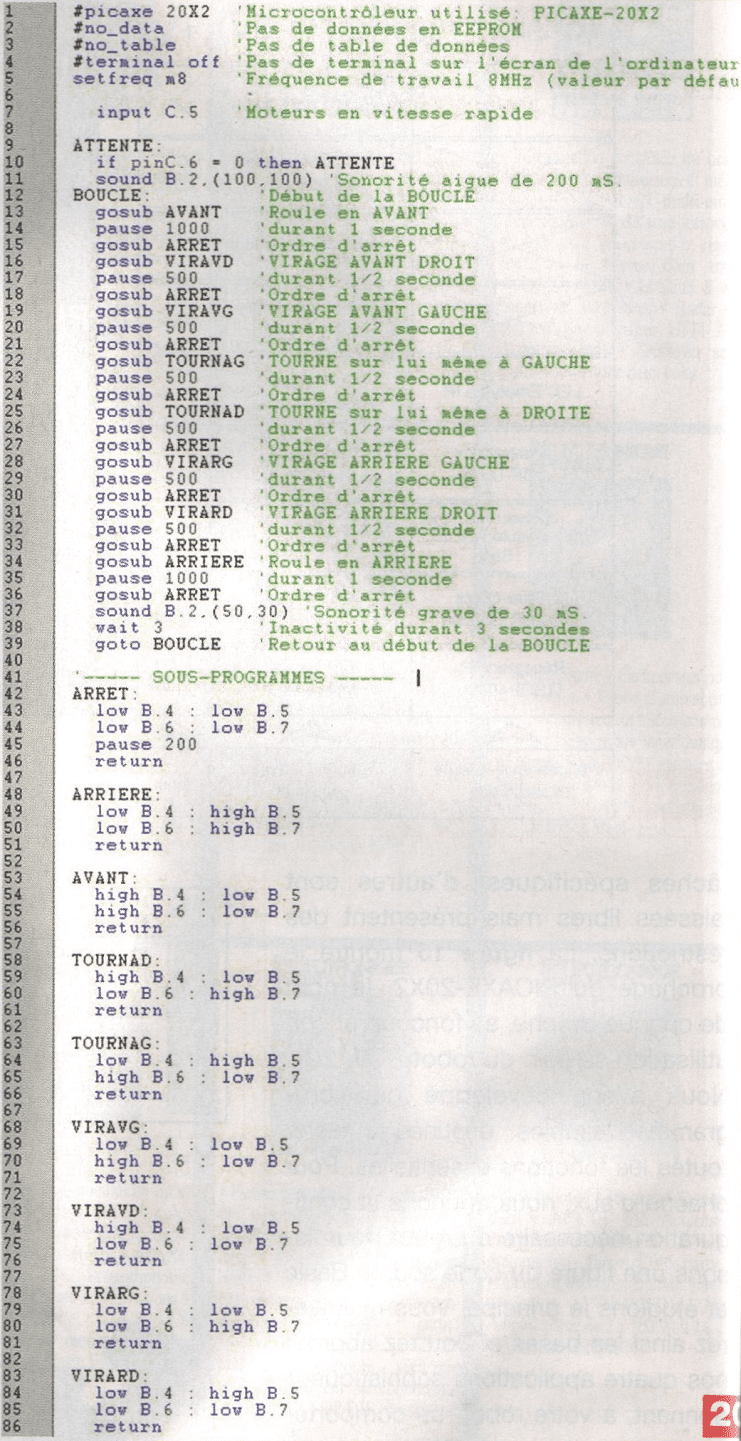
Test des cellules LDR (figure 23).
Kits BOT120 et BOT121 (photo B). Les cellules LDR gauche et droite prennent place à l’avant sur les lignes C.1 et C.3. Nous configurons la directive du terminal à 9 600 Bds. Les canaux ADC7 et ADC9, du convertisseur analogique/numérique, mémorisent la valeur de la luminosité reçue dans les variables b? et b9, pour les cellules LDR droite et gauche. Les valeurs s’affichent ensuite sur l’écran de l’ordinateur, au milieu d’une ligne de texte. Une courte pause permet de rendre l’affichage plus lisible et évite les incohérences de traitement du convertisseur. Le cycle se perpétue au sein de la boucle.
Test ultrasonique (figure 24).
Kits BOT120, BOT121 et module SRF005 (photo B).
Le module ultrasonique SRF005 se fixe au centre, à l’avant, sur la ligne C.2.
Veillez au sens d’insertion du connecteur (une erreur inverse les polarités de l’alimentation du module).
Nous configurons toujours la directive du terminal à 9 600 Bds pour l’affichage.
La boucle sans fin commence par une très courte pause, suivie d’une impulsion de déclenchement de lecture du module avant de réceptionner la valeur dans la variable double wO. Deux opérations mathématiques vont convertir la valeur lue en centimètres dans la variable double w1 et en pouces dans w2.
Les valeurs ainsi obtenues s’affichent sur l’écran de l’ordinateur, au milieu d’une ligne de texte.
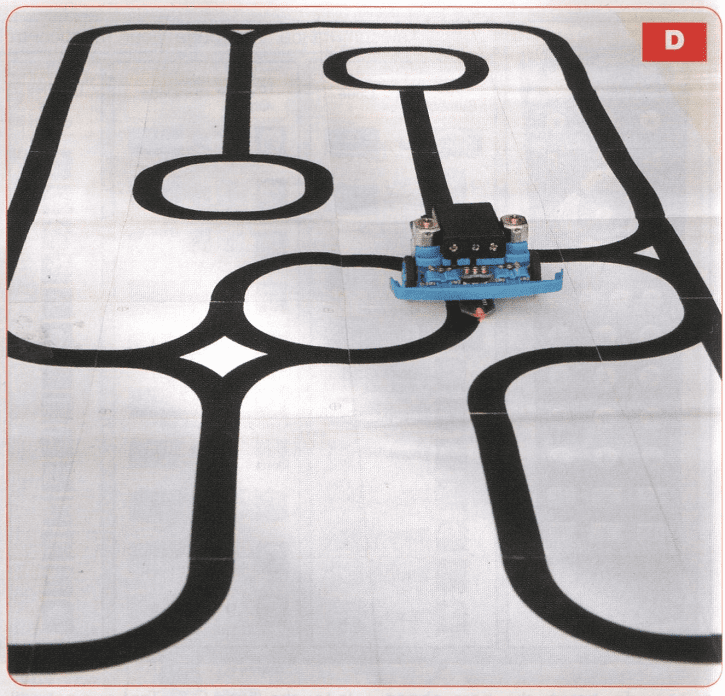
Le robot suit une ligne noire sur un circuit
Base BOT120 seule (photo D). Comme précisé ci-dessus, nous ne détaillerons pas ce programme ni les trois suivants, vous possédez maintenant les bases pour comprendre les principes utilisés pour leur programmation ; ils sont d’ailleurs largement commentés.
Nous donnons simplement le mode de fonctionnement du robot, après la programmation, les détails et les figures nécessaires.
Le robot est monté en version de base. Vous devez lui confectionner un circuit à suivre. Vous pouvez, bien sûr, le réaliser sommairement à l’aide d’un ruban adhésif noir.
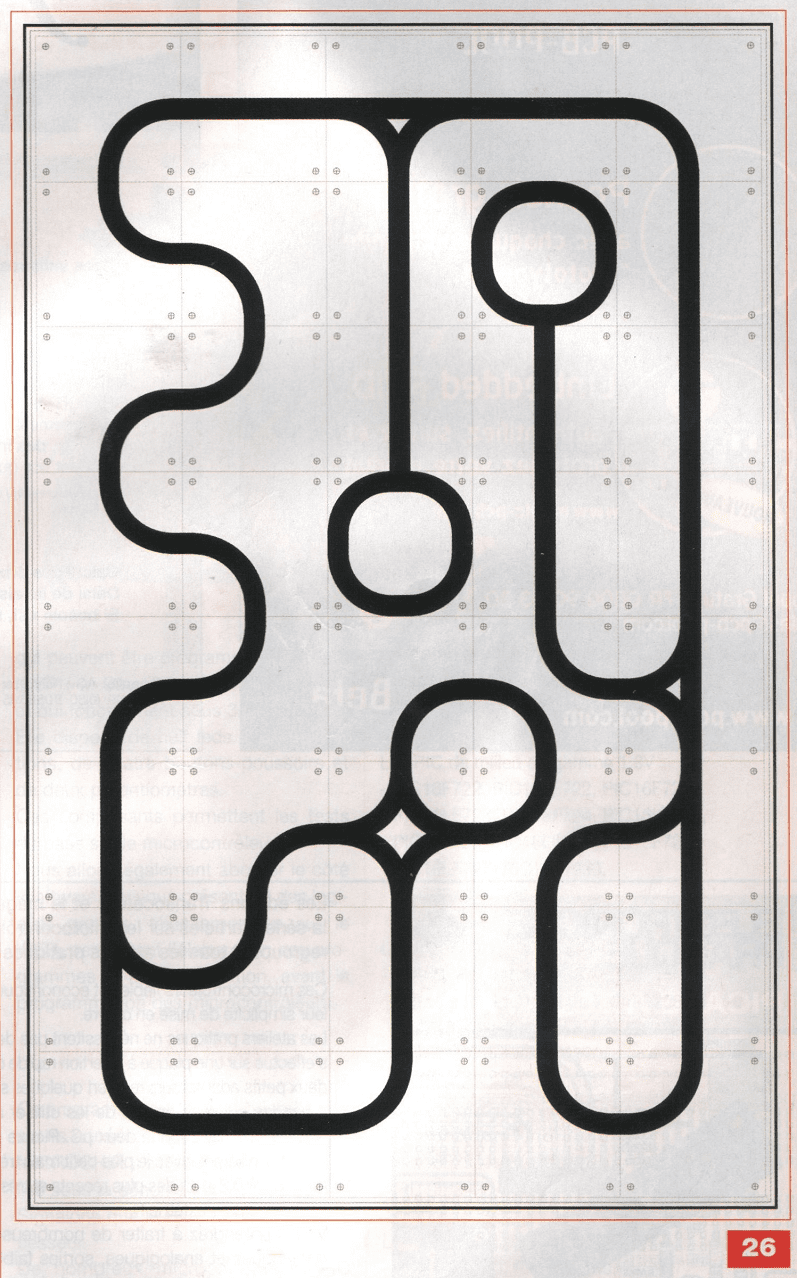
Nous préférons nettement notre solution, bien plus élégante: nous avons dessiné huit formes de base qui, une fois assemblées, permettent de constituer le circuit de votre choix.
Nous vous proposons, à la figure 26, un exemple de circuit, ayant servi pour les tests de notre prototype.
Il suffit de poser le robot programmé sur le circuit et d’appuyer sur la touche. Même s’il n’est pas sur une ligne noire, il la trouvera tout seul. Ensuite, il suivra le tracé du circuit par corrections successives de sa trajectoire (les leds visualisent les virages) jusqu’à épuisement des piles ou jusqu’à la rencontre d’un obstacle avec son pare-chocs. Vous trouverez sur notre site Internet, un fichier au’ format «pdf» regroupant les huit formes de base à l’échelle 1:1, ainsi que huit exemples de circuits élaborés.
Le robot obéit à la télécommande IR
Kits BOT120 et BOT121 (photo B).
Le robot attend les ordres du déplacement émis par la télécommande (bouton rouge = arrêt, flèches = déplacements, touche 7 = virage arrière «gauche », touche 9 = virage arrière «droit », touche (-) = tourne sur lui-même à gauche, touche (+) = tour¬ne sur lui-même à droite),S’il rencontre un obstacle, il s’arrête, émet un bip sonore et attend un autre ordre.
Le robot cherche la lumière
Kits BOT120 et BOT121 (photo B).
Il suffit de poser le robot programmé et d’appuyer sur la touche. Si l’éclairement est insuffisant, il tourne en rond à gauche en émettant des petits bips graves de mécontentement jus-qu’à ce qu’il trouve un éclairage suffisant (lampe de poche par exemple). Il se dirige ensuite vers la source lumineuse en essayant de la suivre. S’il la trouve et rencontre un niveau lumineux assez fort, il émet une petite musique de joie
Le robot se promène librement en évitant les obstacles grâce à son capteur à ultrasons
Kits BOT120, BOT121 et module SRF005 (photo B).
Il suffit de poser le robot programmé d’appuyer sur la touche. Il part en avant. S’il détecte un obstacle à moins de 20 cm,il s’arrête, tourne sur lui-même à gauche, puis à droite analyser l’espace environnant, puis repart dans la direction la plus libre.
S’il est pris dans un cul de sac, il recule avant d’effectuer une nouvelle analyse.
Mergy Yves

0 commentaire
Leave a comment


Articles récents





Articles les plus vus





Articles plus commentés


Scroll to Top