Comment fabriquer un bras robotique ?
L’automatisation est l’un des principaux domaines de développement surtout qu’elle fait progresser l’industrie plus loin que jamais, offrant le potentiel de lignes de production presque entièrement automatisées.
La robotisation est considérée comme la 3ème phase de la révolution industrielle. Une avancée technologique remarquable qui pousse l’humanité à gravir les échelons de la technologie industrielle.
Cela rend les produits moins chers à produire et en plus grandes quantités, ce qui rend la technologie intéressante à investir. Depuis le début de la révolution industrielle, les ingénieurs mécaniciens ont développé des machines pour faciliter la main-d’œuvre. L’électricité et l’informatique ont ouvert la voie à quelque chose de nouveau : la robotique ! Machines automatisées capables d’activité humaine.
Ainsi, la technologie actuelle nous permet de construire des machines capables d’effectuer des actions humaines. Pour ce faire, les robots doivent avoir une autonomie similaire composée de pièces mobiles électromécaniques et d’un composant « cerveau » pour les contrôler en suivant des instructions prédéterminées, ou les faire se maquiller seuls!
Comment fabriquer un bras robotique ?
Dans ce projet, nous construirons la base d’un bras robotique programmable automatisé. Nous apprendrons à construire et à contrôler un bras robotique à 6 axes via une interface de contrôle à partir d’un ordinateur, et à écrire des instructions prédéterminées à suivre et à répéter. Nous utiliserons des servomoteurs pour piloter les pièces et un Arduino UNO comme microcontrôleur qui les contrôlera tout en communiquant avec le PC via un câble USB.
Les principales parties de ce projet seront les suivantes :
- 6DOV Kit de robot en aluminium
- Des disques Servoscopiques en métal 25T Cornes pour MG995 x6
- DMS15-270 ou MG996R Servomoteur X6
- Un circuit d’énergie (XL4015 DC-DC BUCK Converter)
- Une base lourde pour garder le bras fixe et stable (j’ai utilisé une brique…)
- Arduino UNO
- Un bouclier Arduino UNO
- 9-20V à une source d’alimentation de 2A
- Des langages de programmation utilisés dans ce projet :
- C (IDE Arduino)
Le matériel nécessaire :
Le matériel mécanique:
Certains kits de bras de robot DIY 6DOV sont livrés avec toutes les pièces pertinentes (embouts en aluminium, servodisque et servomoteurs) incluses, tandis que d’autres ne le font pas.
L’assemblage du bras doit être fait avec soin et peut prendre une heure ou deux. Fixez fermement les boulons pour minimiser les pièces pendantes – mais pas trop serrées!
Lors de l’assemblage des moteurs, faites attention au côté auquel les moteurs 1, 2 et 3 sont confrontés. Parce que cela affectera la direction dans laquelle le bras se déplacera, dans la mesure où la rotation des moteurs est contrôlée par une application Windows reste constante. De plus, si le câble à 3 fils n’est pas assez long pour atteindre le sol lorsque le bras est complètement étiré, vous devrez couper le câble et y ajouter plus de fil.
Une fois assemblé, installez le bras sur la fondation fixe. Parce que quand il bougera, il aura une forte impulsion; Donc, pour éviter de tomber à l’envers, le bras doit être fixé à une plate-forme stable pour le soutenir. Personnellement, j’ai collé la base du bras à une brique et cela a bien fonctionné.
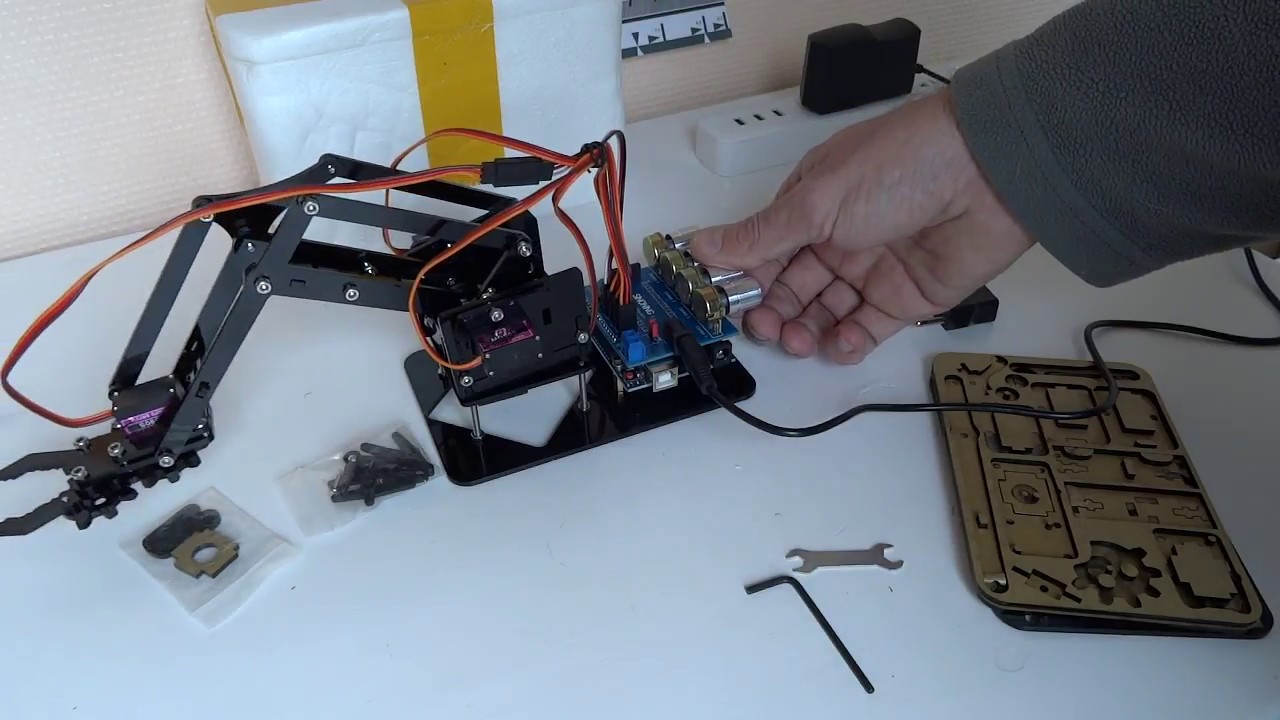
Le matériel électrique :
Le circuit est assez simple. Vous n’avez pas du tout besoin d’un diplôme d’ingénieur. Connectez tous les servomoteurs à l’alimentation en parallèle. Le fil brun est (-) et le fil rouge est (+). Les fils de commande qui sont de couleur orange ou jaune vont aux broches PWM de l’Arduino. Ce sont les broches 3, 5, 6, 9, 10 et 11. Je recommande d’utiliser un blindage compatible avec toutes les broches d’E/S qui fournit des lignes électriques parallèles auxquelles vous pouvez souder des broches ordinaires.
De cette façon, il est plus facile de connecter les servomoteurs à l’aide de leurs connecteurs femelles à 3 broches.
Il ne suffit pas de mettre le système sous tension à partir d’un câble USB. Nous aurons besoin d’une source d’alimentation externe. J’utilise une batterie au lithium 12V connectée à un convertisseur BUCK DC-DC. Nous aurons besoin d’un module capable de fournir un courant de crête de 4A.
Les circuits basés sur XL4015 sont très efficaces car ils abaissent la tension et augmentent le courant à la charge à un taux efficace de 90%. Réglez la tension de sortie sur 5,1 V. Mesurez la tension avec un DMM si la carte n’a pas d’écran intégré.
N’utilisez pas de régulateurs de tension pour ce plaisir ou dans tout projet nécessitant une régulation de tension à des courants élevés, car les régulateurs de tension zener de base comme le LM7805 ne génèrent pas de gain de courant et sont donc très inefficaces et chaufferont rapidement.
N’allumez pas les moteurs avant de télécharger le logiciel, car vous devez toujours les calibrer à leur position par défaut.
Nous voulons construire un bras programmable et contrôlable. Pour cela, nous avons besoin d’une interface qui affiche tous les contrôles et peut exécuter des commandes prédéfinies. La meilleure façon de maintenir cette exigence est d’utiliser un logiciel informatique. À cette fin, nous avons développé une application Windows .NET Framework qui est disponible en téléchargement gratuit. Il communiquera avec la carte Arduino via une interface USB, tandis que l’Arduino servira de pont entre le PC et les moteurs.
Nous voulons construire un bras programmable et contrôlable. Pour cela, nous avons besoin d’une interface qui montre tous les contrôles.
La programmation du bras robotisé pour exécuter des commandes prédéfinies sera également disponible via l’interface. La meilleure façon de maintenir cette exigence est d’utiliser un logiciel informatique.
Application Windows NET Framework disponible en téléchargement gratuit. Il communiquera avec la carte Arduino via une interface USB, tandis que l’Arduino servira de pont entre le PC et les moteurs.
Le logiciel
Après avoir téléchargé le code sur la carte Arduino UNO, vous pouvez connecter les moteurs et les faire pivoter à leur position par défaut. Exécutez le programme « Contrôle du bras du robot », sélectionnez le Serial PORT COM.
Fabriquer un bras robotique peut être tout un défi, car il nécessite des compétences dans de nombreux domaines de l’ingénierie. Néanmoins, vous êtes maintenant en mesure de construire votre propre bras robotisé. N’hésitez pas à construire votre propre bras robotique pour développer davantage le domaine à la fois stimulant et passionnant de la robotique!

0 commentaire
Leave a comment


Articles récents





Articles les plus vus





Articles plus commentés

Scroll to Top