Construire un bras robotique contrôlée par la carte Arduino
Un bras robotique contrôlé par la carte Arduino est un bras robotique qui est piloté par une carte de développement électronique Arduino. Pour créer un bras robotique contrôlé par la carte Arduino, vous aurez besoin de plusieurs éléments :
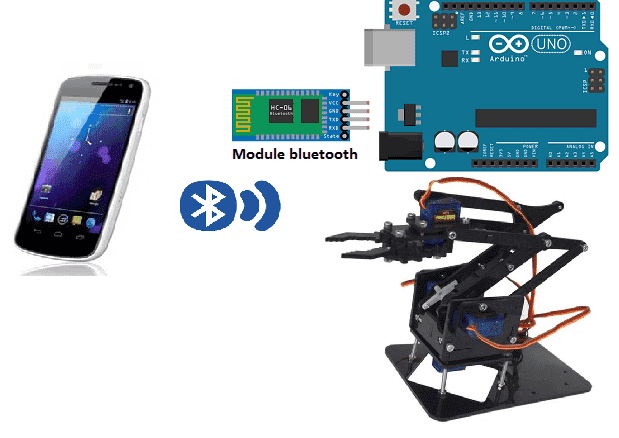
- Un bras robotique : vous pouvez acheter ou construire vous-même un bras robotique en utilisant des servomoteurs ou des moteurs pas à pas pour actionner les articulations du bras.
- Une carte Arduino : vous aurez besoin d’une carte Arduino pour contrôler les servomoteurs ou les moteurs pas à pas qui actionnent les articulations du bras.
- Des capteurs : vous pouvez ajouter des capteurs au bras robotique pour lui donner des fonctionnalités supplémentaires, comme la détection de la distance ou de la couleur.
- Un ordinateur : vous aurez besoin d’un ordinateur pour écrire le code qui contrôlera le bras robotique. Vous pouvez utiliser n’importe quel ordinateur doté d’un port USB et d’un logiciel de développement Arduino.
Pour contrôler le bras robotique avec la carte Arduino, vous devrez écrire un programme en utilisant un langage de programmation comme C ou C++. Ce programme définira les actions que le bras robotique doit réaliser en fonction des données collectées par les capteurs ou en réponse à des commandes envoyées par l’ordinateur. Une fois votre programme écrit, vous pouvez le téléverser sur la carte Arduino à l’aide d’un câble USB, et le bras robotique sera alors en mesure de suivre vos instructions.
Un bras robotique contrôlé par la carte Arduino est un bras robotique qui est piloté par une carte de développement électronique Arduino et qui peut être programmé pour réaliser différentes actions en fonction de données collectées par des capteurs ou de commandes envoyées par un ordinateur.

0 commentaire
Leave a comment


Articles récents

Les casques de moto de demain : quelles avancées technologiques pour une meilleure protection ?
07-11-23
Le futur de la robotique et des ordinateurs : comment la technologie va-t-elle révolutionner nos vies ?
08-03-23
Comment sauver ses cassettes MiniDV ?
09-01-23
Création les applications mobiles avec App Inventor
19-12-22
Articles les plus vus





Articles plus commentés


Scroll to Top