
Un robot filoguidé
A maintes reprises, nous avons publié dans nos colonnes toutes sortes de robots. Ce petit dernier parcourt son bonhomme de chemin en suivant fidèlement un parcours matérialisé par un fil conducteur.
Le fil conducteur peut d’ailleurs être invisible s’il est dissimulé sous un tapis, ou s’il est collé au
dos d’une surface plane d’évolution. Les capteurs de champ magnétique situés sous le robot n’auront aucune difficulté à le détecter.
Le principe du guidage
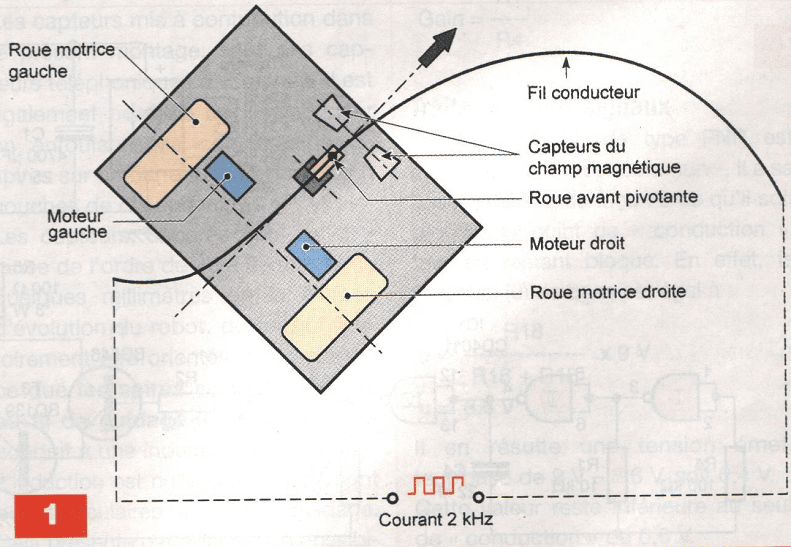
Le fil de guidage est parcouru par un courant, caractérisé par une fréquence de l’ordre de 2 kHz. Le mobile comporte deux roues motrices, situées à l’arrière, qui sont commandées par deux moteurs indépendants, après une démultiplication adaptée. A l’avant se trouve une roue pivotante, celle-ci permet au robot d’effectuer des virages à gauche ou à droite, suivant que l’un ou l’autre des deux moteurs de propulsion n’est plus alimenté. Bien entendu, si les deux moteurs sont simultanément opérationnels, le robot filoguidé avance suivant une ligne droite (figure 1).
A l’avant du mobile, deux capteurs de champ magnétique sont disposés de part et d’autre de la ligne de guidage. Ces derniers sont le siège de courants induits issus du fil conducteur. L’électronique du module embarqué amplifie et traite ces signaux. Elle compare sans cesse leurs amplitudes qui sont égales lorsque les deux capteurs sont à égale distance du fil conducteur. Si le parcours amorce un virage, les distances deviennent inégales. Il en est de même en ce qui concerne les amplitudes correspondantes. Si le virage amorcé se dirige par exemple vers la droite, c’est le moteur droit qui est ralenti, voire arrêté, si le virage est plus court.
Le fonctionnement
Le générateur des signaux de guidage
Alimentation
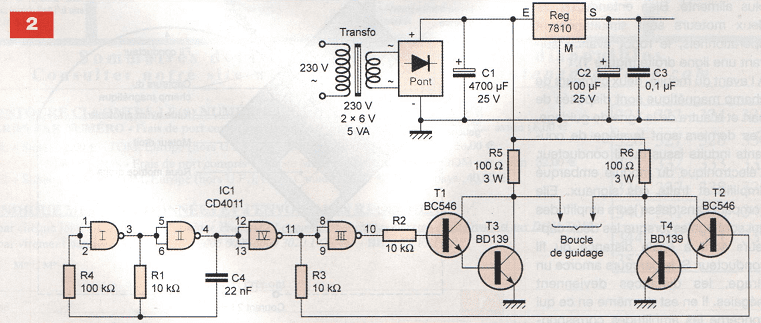
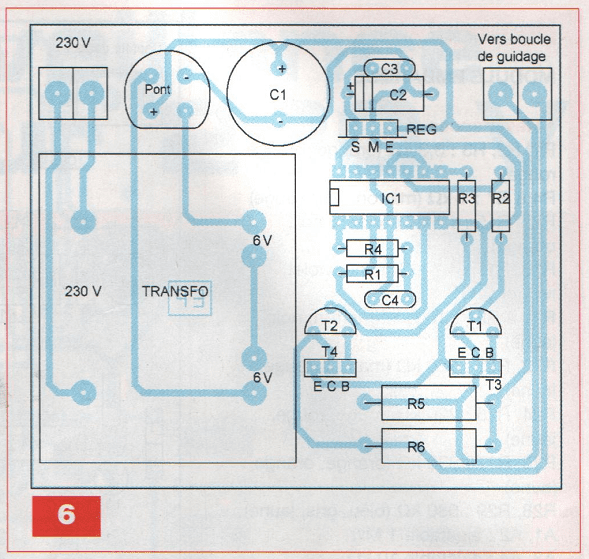
L’énergie est prélevée du secteur 230 V, par l’intermédiaire d’un transformateur d’alimentation. Il fournit sur son enroulement secondaire une tension alternative de 12 V. Un pont de diodes redresse les deux alternances. Le condensateur C1 effectue un premier lissage de ce potentiel ainsi redressé (figure 2). En sortie du régulateur Reg, une tension continue stabilisée à +10 V est disponible. Le condensateur C2 réalise un filtrage complémentaire alors que C3 joue le rôle de capacité de découplage.
Génération de la fréquence pilote
Les portes NAND (I) et (II) du circuit intégré IC1 sont montées en oscillateur. Sur la sortie de ce dernier, nous relevons un signal de forme carrée, caractérisé par une période dont la valeur « T » est déterminée par la relation:
T = 2,2 x R1 x C4
Le lecteur vérifiera que la valeur obtenue est de 0,5 ms, ce qui correspond à une fréquence de 2 kHz.
Amplification
Les portes NAND (IV) et (III) effectuent deux inversions successives du signal généré. La sortie de la porte (IV) est en relation, par l’intermédiaire de R3, avec la base du transistor NPN/T2 dont l’émetteur est relié à la base de T4, un autre transistor NPN, mais de puissance plus importante. L’ensemble constitue un Darlington, montage réalisant une importante amplification en courant. Les collecteurs réunis des deux transistors sont en relation avec R6 dont l’autre extrémité est reliée à l’armature positive de C1. A ce niveau, la tension est de l’ordre de +20 V.
La sortie de la porte NAND (III) est reliée à un second Darlington, en tout point identique au premier et dont les collecteurs réunis sont en relation avec R5.
L’alimentation de la boucle de guidage est disponible sur les deux points de sorties des Darlington. Ces derniers conduisant alternativement, un courant égal à 20 V/100 n, soit environ 200 mA et de 2 kHz de fréquence, circule alors dans la boucle.
La puissance dissipée dans chaque résistance est égale à 20 V x 0,2 A, soit 4 W. Comme les résistances ne sont actives qu’une fois sur deux, la puissance « Joule » moyenne dissipée n’est plus que de 2 W. Nous retiendrons donc une valeur de 3 W comme caractéristique de ces deux résistances.
Le module embarqué
Alimentations
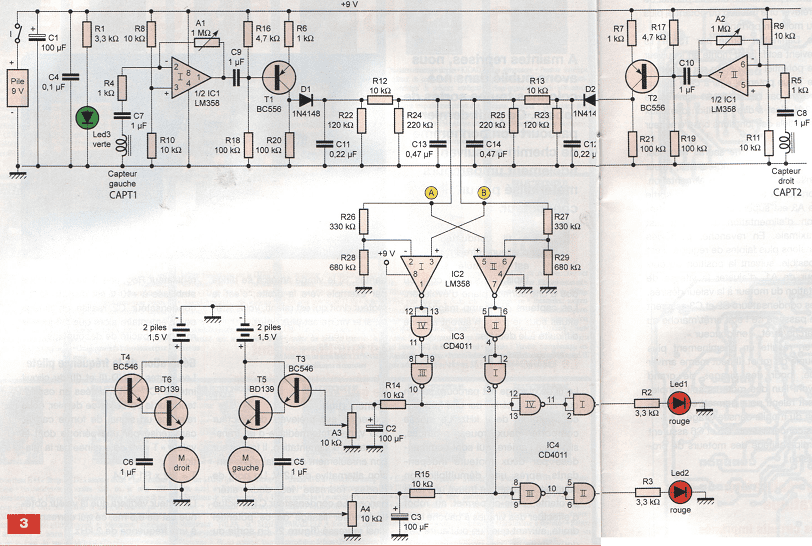
Le robot filoguidé nécessite deux alimentations distinctes (figure 3).
Une première, constituée par une pile de 9 V que l’interrupteur (1) permet de mettre en service, est destinée aux circuits d’amplification, au traitement des signaux de commande des Darlington de sorties. Sa mise en ser¬vice est signalisée par l’illumination de la led verte L3, dont le courant est limité par R1.
La seconde alimentation comprend deux groupes de deux piles LR6 de 1,5 V, pour former les sources séparées de la fourniture d’énergie aux deux moteurs de propulsion.
Les capteurs
Les capteurs mis à contribution dans le présent montage, sont des capteurs téléphoniques à ventouse. Il est également possible de les fabriquer en enroulant une cinquantaine de spires sur un barreau métallique (cinq couches de dix spires).
Les capteurs, séparés par une distance de l’ordre de 20 à 25 mm et de quelques millimètres de la surface d’évolution du robot filoguidé, doivent obligatoirement être orientés de manière à ce que les spires soient parallèles au fil de guidage. Cette orientation conduit à une induction maximale. L’induction est nulle si les spires sont perpendiculaires au fil de guidage. Cela présente par ailleurs une possibilité intéressante. En effet, le fil de guidage, au niveau de la forme du parcours, peut être croisé perpendiculairement avec lui-même sans gêner aucunement l’évolution du robot filoguidé.
Amplification des signaux
Les deux capteurs sont à l’origine de deux chaînes séparées, mais iden-tiques, d’amplifications et de traitements des signaux. Étudions à titre d’exemple celle dont les signaux sont reçus par le capteur CAPT 1.
Les signaux sont acheminés sur l’entrée « inverseuse » de l’amplificateur (1) de IC1, par l’intermédiaire de C7 et de R4.
L’entrée « non inverseuse » est soumise à un potentiel fixe, égal à la demi-tension d’alimentation, grâce au pont diviseur formé par R8 et R10 (résistances d’égale valeur). C’est d’ailleurs ce potentiel que délivre la sortie de l’amplificateur en l’absence de signaux.
En revanche, lorsque le capteur se trouve à une distance pouvant aller jusqu’à plusieurs centimètres du fil de guidage, la sortie de l’amplificateur présente des impulsions, orientées alternativement vers le haut et le bas de la référence de repos de +4,5 V. Le temps séparant deux impulsions de même orientation est de 0,5 ms. Le gain de ce premier étage amplificateur dépend essentiellement de la position du curseur de l’ajustable A1. Plus précisément, sa valeur s’exprime par la relation:
Gain =A1/R4
Traitement des signaux
Le transistor T1, de type PNP, est monté en « émetteur commun », Il a sa base polarisée de façon à ce qu’il soit proche du point de « conduction », tout en restant bloqué. En effet, le potentiel (u) de base est égal à :
u =(R18/(R16 + R18)) x 9 V
u = 8,6 V
Il en résulte une tension émetteur/base de 9 V – 8,6 V, soit 0,4 V. Cette valeur reste inférieure au seuil de « conduction» de 0,6 V.
| Allure du parcours de guidage | LED L1 | LEDL2 |
| Ligne droite | Allumée | Allumée |
| Virage à gauche | Eteinte | Allumée |
| Virage à droite | Allumée | Eteinte |
Tableau 1
En l’absence de signaux issus de la sortie de l’amplificateur, le potentiel au niveau du collecteur de T1 est donc nul. En revanche, lorsque le fil de guidage est actif, les signaux issus de l’amplificateur (1) sont appliqués sur la base de T1, par l’intermédiaire de C9. Le collecteur délivre alors une suite d’impulsions positives, d’amplitude plus ou moins élevée, suivant la distance existant entre le capteur et le fil de guidage.
Ces impulsions, par l’intermédiaire de la diode anti-retour D1, chargent périodiquement le condensateur C11. Il ne peut se décharger qu’à une allure plus ralentie, étant donnée la valeur plus importante de R22.
Enfin et par l’intermédiaire de R12, le condensateur C13 est également chargé à cette occasion. Sa décharge s’effectue par R24, de valeur également plus importante. En définitive, sur l’armature positive de C13, une tension fixe apparaît. Elle se caractérise par une valeur de 1 à 2 V, jusqu’à environ 6 V, suivant la distance qui sépare le capteur du fil de guidage.
Le comparateur
Les amplificateurs (1) et (II) de IC2 sont montés pour former un comparateur des potentiels aux points (A) et (8). Trois possibilités peuvent se présenter. La première est la situation d’équilibre. C’est celle où les potentiels que présentent les points (A) et (8) sont proches, c’est-à-dire que les dis-tances séparant les deux capteurs du fil de guidage sont égales à quelques millimètres près. Dans cette situation et compte tenu de la présence des ponts diviseurs R26/R28 et R27/R29, il est clair que pour les deux amplificateurs (1) et (II), le potentiel auquel est soumise l’entrée « non inverseuse » est supérieur à celui qui caractérise l’entrée « inverseuse ». Dans ce cas, les deux amplificateurs présentent un état « haut ».
Une deuxième possibilité se présente lorsque le fil de guidage amorce, par exemple, un virage à gauche.
Si le mobile continue d’avancer en ligne droite, la distance entre le capteur droit et le fil de guidage augmente, tandis que celle qui existe entre le capteur gauche et le fil de guidage diminue.
Il en résulte une augmentation du potentiel au niveau du point (A) et une diminution au point (8). A partir d’un certain seuil de déséquilibre, le potentiel sur l’entrée « inverseuse » de l’amplificateur (1) devient supérieur à celui de l’entrée « non inverseuse « . La sortie passe à l’état « bas », En revanche, rien ne change pour l’amplificateur (II). Au contraire, la situation initiale évoquée ci-dessus va plutôt se renforcer, étant donné que le potentiel sur l’entrée « non inverseuse » aura encore augmenté.
Enfin, en cas de virage à droite du par-cours, c’est bien entendu le résultat inverse qui se produit. La sortie de l’amplificateur (II) passe à l’état « bas » tandis que celle de l’amplificateur (1) reste à l’état « haut « .
Les niveaux logiques délivrés par les sorties des deux comparateurs sont pris en compte par une suite de deux inverseurs NAND de IC3.
Ces derniers délivrent des états « haut » et « bas » nettement définis et correspondant respectivement aux potentiels 0 V et 9 V.
Enfin, les portes NAND contenues dans IC4 retransmettent ces mêmes niveaux à deux leds rouges qui signa-lisent les états « haut » sur les sorties des amplificateurs.
Le tableau 1 résume les différents cas que nous venons d’évoquer.
Commande des moteurs de propulsion
Prenons à titre d’exemple, le cas du moteur gauche (MG). Lorsque la sortie du comparateur (1) passe à l’état « haut « , le condensateur C2 se charge à travers R14. La tension sur l’armature positive augmente graduelle¬ment. Il en est de même en ce qui concerne la sortie de l’ajustable A3,dont la position du curseur permet de prélever une fraction du potentiel plus ou moins importante.
Le Darlington formé par T3 et T5 devient actif. Il est monté en « suiveur de potentiel « . Il délivre sur l’émetteur de T5 un potentiel égal à celui qui est prélevé par l’ajustable A1 diminué de 1,2 V, c’est-à-dire l’addition des deux potentiels des jonctions base/émetteur de T3 et de T5.
Mais la tension ne saurait dépasser 3 Vaux bornes du moteur MG, valeur limite imposée par son alimentation. Lorsque la tension au point de sortie de A3 est supérieure à 4,2 V, la tension d’alimentation du moteur est maximale. En revanche, pour des tensions plus faibles de réglage, il est possible, suivant la position du curseur de A1, d’ajuster la vitesse de rotation du moteur à la valeur désirée. Les condensateurs C2 et C3 assurent un passage de l’état arrêt/marche ou marche/arrêt, « en douceur « .
Il en résulte un cheminement plus souple du robot filoguidé. Il peut même arriver que, pour des virages de grand rayon, l’un des moteurs soit simplement ralenti pour permettre l’inscription du mobile dans le virage.
Les condensateurs C5 et C6 assurent l’antiparasitage des moteurs de pro-pulsion.
La réalisation pratique
Les circuits imprimés
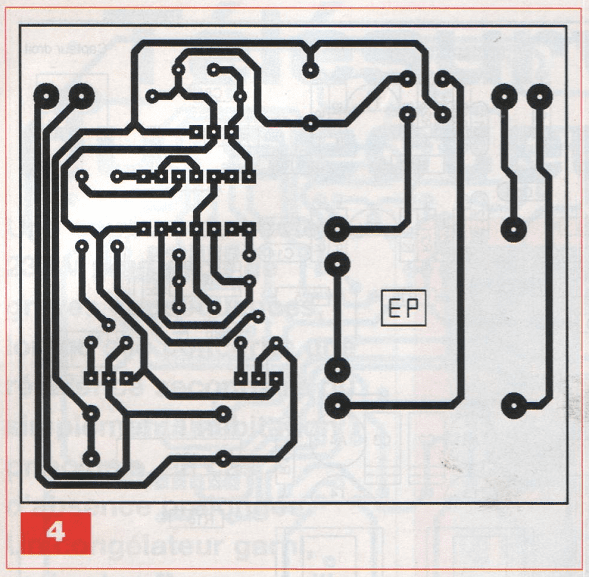
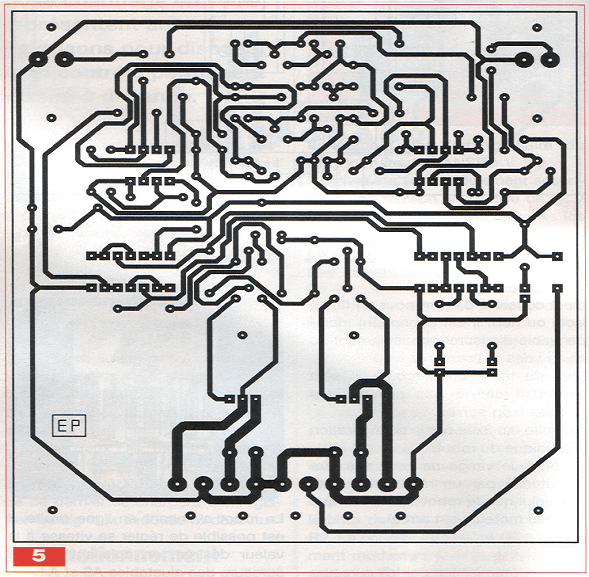
Les figures 4 et 5 reprennent les tracés des circuits imprimés du module « générateur de signaux de guidage » et du module « embarqué » à bord du robot filoguidé. Ils n’appellent aucune remarque particulière.
Les pistes destinées à véhiculer le courant d’alimentation des moteurs de propulsion se caractérisent par une largeur plus importante.
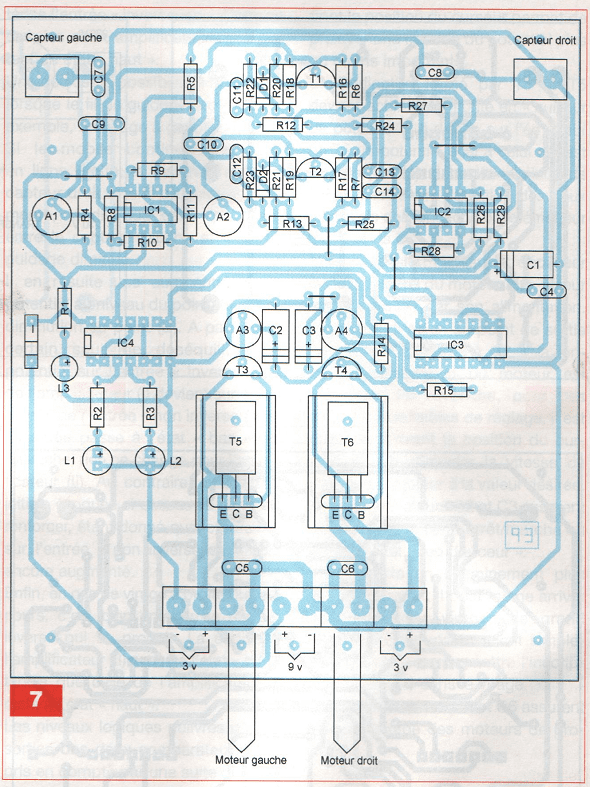
l’implantation des composants
Les schémas d’insertion des composants font l’objet des figures 6 et 7. Comme d’habitude, il est important de bien respecter l’orientation des éléments polarisés. Les transistors T5 et T6 sont munis de dissipateurs.
La partie mécanique
Le montage présenté n’est qu’un exemple possible de réalisation. Nos lecteurs à l’esprit imaginatif trouveront sans doute des variantes.
La roue avant pivotante est disponible dans les magasins de bricolage. Les revendeurs de composants proposent également des moteurs, munis de trains d’engrenages, pour assurer la propulsion du robot. Il existe même des ensembles dont on peut modifier à volonté le rapport de démultiplication, en agissant sur le nombre de pignons intermédiaires. Pour ce robot, les piles d’alimentation ont été montées sous le véhicule. Les capteurs à ventouse ont été fixés à l’avant sur deux surfaces parallèles dans un plan perpendiculaire à la sur-face d’évolution .
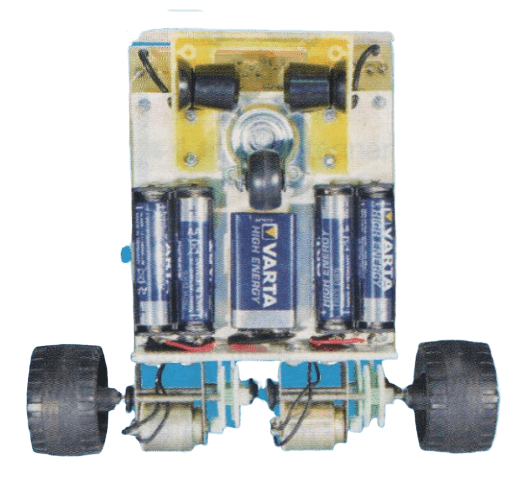
partie mécanique du robot
La surface d’évolution
Beaucoup de possibilités existent. Une plaque de contreplaqué ou d’isorel peut faire l’affaire. Le fil de guidage peut être fixé au dos de la surface, à l’aide de ruban adhésif.
Il est conseillé d’opter pour un fil fin, isolé ou non. Il est cependant indispensable d’assurer son isolement au niveau des croisements à 90°.
Lors du tracé du parcours, il sera important de ne pas prévoir des virages trop serrés.
La limite est fixée par la configuration mécanique du robot.
En effet, le virage ne peut pas être caractérisé par un rayon plus petit que celui que le robot décrit, lorsque l’un des moteurs est arrêté.
Les réglages
Dans un premier temps, les curseurs des ajustables A 1 et A2 seront positionnés à mi-course, position qui conviendra généralement. Au besoin, les gains des amplificateurs de IC1 pourront être augmentés en tournant les curseurs dans le sens horaire.
Le robot avançant en ligne droite, il est possible de régler sa vitesse à la valeur désirée, en agissant sur les curseurs des ajustables A3 et A4. Ces curseurs permettent également d’aboutir à l’équilibre de la vitesse de rotation des deux moteurs de propulsion pour obtenir un parcours en ligne droite.
R.KNOERR

2 commentaires
Leave a comment


Articles récents





Articles les plus vus





Articles plus commentés

Scroll to Top
raveneau jean yves 19-03-2323
je souhaite réaliser un chariot transportant des panneaux solaires et utiliser la technique du filoguidage avec fil magnétique enterré dans le sol . Pouvez vous m'indiquer ou je peux trouver des cartes electroniques clé en main pour réaliser ce filoguidage. merci
Mickael 17-12-2222
Bonjour, Je suis maraicher, j'ai des chariots électriques, je souhaiterais qu'il se guide tout seul entre mes rangs de culture, j'aimerais essayer la technique du filoguidage où peut on trouvez un carte de filoguidage et le générateur pour le fil guide. Merci de votre aide.