Objective of this project:
In this project we will build a car equipped with an ESP32 card and a hc-06 bluetooth module and controlled by the computer via bluetooth.
The user controls the car using the arrow keys on the keyboard (forward, right, left and back).
Components required
- ESP32 card
- L298N module
- hc-06 bluetooth module
- power supply module
- connecting wires
-
car chassis
-
two wheels
-
two motors
-
roulette
-
9V battery
- une roulette
- une batterie de 9V
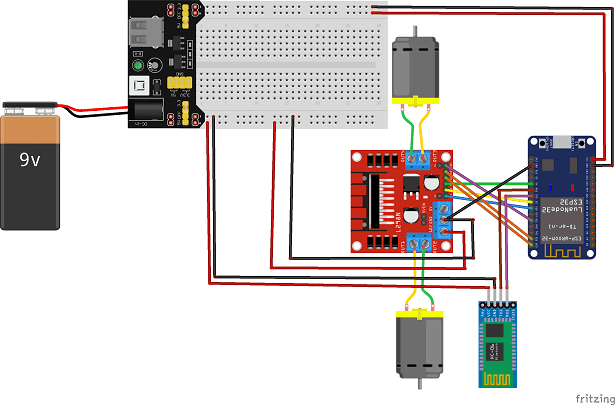
Car assembly:
-
Connect pin N °5 of the ESP32 board to pin IN1 of the L298N module.
-
Connect pin N ° 4 of the ESP32 board to pin IN2 of the L298N module.
-
Connect pin No. 23 of the ESP32 board to pin IN3 of the L298N module.
-
Connect pin N ° 22 of the ESP32 board to pin IN4 of the L298N module.
-
Connect the GND pin of the ESP32 board to the GND pin of the L298N module.
-
Connect the VIN pin of the ESP32 board to the (+) terminal of the power supply module
-
Connect the GND pin of the ESP32 board to the (-) terminal of the power supply module
-
Connect the 12V pin of the L298N module to the (+) terminal of the power supply module
-
Connect the TX pin of the HC-06 module to the RX pin of the ESP32
-
Connect the RX pin of the HC-06 module to the TX pin of the ESP32
-
Connect the VCC pin of the HC-06 module to the (+) terminal of the power supply module
-
Connect the GND pin of the HC-06 module to the (-) terminal of the power supply module
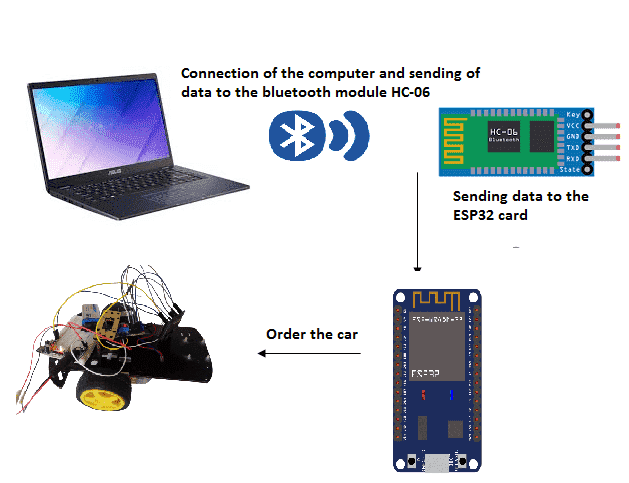
Communication between the computer, HC-06 and the ESP32 card:
Micropython program for the ESP32 board
Here is the program which allows to connect the ESP32 card to the HC-06 bluetooth module and to receive a message containing the direction of direction of the car.
Copy the following code to the ESP32 boot.py file.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |
from machine import UART from dcmotor import DCMotor from machine import Pin, PWM from time import sleep import time import utime frequency = 15000 pin1 = Pin(5, Pin.OUT) pin2 = Pin(4, Pin.OUT) pin3 = Pin(23, Pin.OUT) pin4 = Pin(22, Pin.OUT) enable = PWM(Pin(18), frequency) enable1 = PWM(Pin(21), frequency) dc_motor = DCMotor(pin1, pin2, enable) dc_motor = DCMotor(pin1, pin2, enable, 350, 1023) dc_motor1 = DCMotor(pin3, pin4, enable1) dc_motor1 = DCMotor(pin3, pin4, enable1, 350, 1023) uart = UART(2, 9600) uart.init(9600, bits=8, parity=None, stop=1) print(uart) while True: if uart.any(): while uart.any(): buf = uart.read() print(str(buf,'utf-8')) if str(buf,'utf-8')=='forward' : dc_motor.forward(100) # car moves forward dc_motor1.forward(100) if str(buf,'utf-8')=='backwards' : dc_motor.backwards(100) # car backs up dc_motor1.backwards(100) if str(buf,'utf-8')=='left' : dc_motor.forward(10) # car turns left dc_motor1.forward(100) if str(buf,'utf-8')=='right' : dc_motor.forward(100) # car turns right dc_motor1.forward(10) if str(buf,'utf-8')=='stop' : dc_motor.stop() # car stops dc_motor1.stop() utime.sleep_ms(10) try: uart.write("OK") print('sent response') except OSError: pass |
Copy the following code into an ESP32 file named dcmotor.py.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
class DCMotor: def __init__(self, pin1, pin2, enable_pin, min_duty=750, max_duty=1023): self.pin1=pin1 self.pin2=pin2 self.enable_pin=enable_pin self.min_duty = min_duty self.max_duty = max_duty def forward(self,speed): self.speed = speed self.enable_pin.duty(self.duty_cycle(self.speed)) self.pin1.value(1) self.pin2.value(0) def backwards(self, speed): self.speed = speed self.enable_pin.duty(self.duty_cycle(self.speed)) self.pin1.value(0) self.pin2.value(1) def stop(self): self.enable_pin.duty(0) self.pin1.value(0) self.pin2.value(0) def duty_cycle(self, speed): if self.speed <= 0 or self.speed > 100: duty_cycle = 0 else: duty_cycle = int(self.min_duty + (self.max_duty - self.min_duty)*((self.speed-1)/(100-1))) return duty_cycle |
Python program executed in the computer:
This is the program that allows the computer to connect and send data to the HC-06 bluetooth module.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 |
import serial import time from pynput import keyboard evenement="" print("Start") port="COM20" #This will be different for various devices and on windows it will probably be a COM port. bluetooth=serial.Serial(port, 9600)#Start communications with the bluetooth unit print("Connected") bluetooth.flushInput() #This gives the bluetooth a little kick result = str(0) def on_key_release(key): global result #print('released %s' % key) #result ='released %s' % key+'\n' if result !='stop': #or result == str(2)+'\n' or result == str(3)+'\n' or result == str(4)+'\n': result = 'stop' print(result) result_bytes = result.encode('utf_8') bluetooth.write(result_bytes) def on_key_pressed(key): global result #print('pressed %s' % key) result1 ='%s' % key if result == 'stop': if result1=='Key.up' : result = 'forward' print(result) if result1=='Key.down' : result = 'backwards' print(result) if result1=='Key.left' : result = 'left' print(result) if result1=='Key.right' : result = 'right' print(result) result_bytes = result.encode('utf_8') bluetooth.write(result_bytes) with keyboard.Listener(on_release = on_key_release,on_press=on_key_pressed) as listener: listener.join() |
You can also see


0 commentaire
Leave a comment


Recent tutorials





Most viewed tutorials





Most commented tutorials




Scroll to Top