But du tutoriel
On peut commander jusqu’à 4 moteurs avec un Arduino et un module Shield L293D.
Voici les étapes à suivre pour commander 4 moteurs avec un Arduino et un module Shield L293D :
- Branchez le module Shield L293D sur les ports d’extension de l’Arduino.
- Reliez les broches d’entrée des modules L293D aux broches de sortie de l’Arduino pour les contrôler.
- Connectez les broches de sortie du module Shield L293D aux bornes des moteurs.
- Écrivez le code pour l’Arduino pour contrôler les moteurs en utilisant les broches d’entrée des modules L293D.
- Téléchargez le code sur l’Arduino et testez les moteurs pour vous assurer qu’ils fonctionnent correctement.
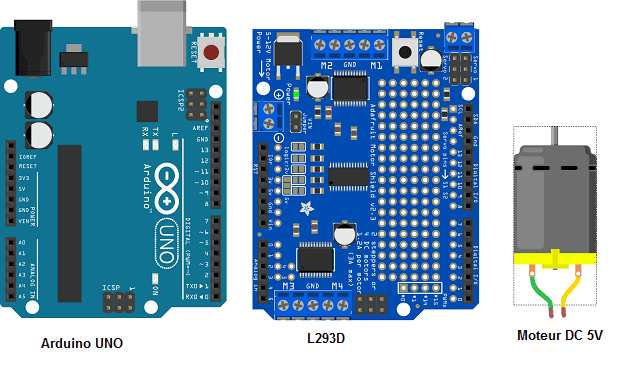
Composants nécessaires
Arduino UNO

L’Arduino UNO est un microcontrôleur populaire pour les projets de domotique, de robotique et de développement de produits électroniques. Il est facile à utiliser et à programmer grâce à son environnement de développement intégré (IDE) en open source et à sa grande communauté d’utilisateurs.
L’Arduino UNO dispose de :
- Un processeur ATmega328P, capable d’exécuter des instructions à une vitesse de 16 MHz.
- 14 entrées/sorties digitales, 6 d’entre elles peuvent être utilisées en tant que sorties PWM.
- 6 entrées analogiques, qui peuvent être utilisées pour lire des données provenant de capteurs ou d’autres entrées analogiques.
- Un port USB pour la connexion à un ordinateur pour le développement et la programmation.
- Un port de liaison série (TX et RX) pour la communication avec d’autres dispositifs électroniques.
L’Arduino UNO peut être utilisé avec un grand nombre de shields et de modules pour étendre ses fonctionnalités, comme le module Shield L 293D pour commander des moteurs. Il peut être programmé en utilisant un certain nombre de langages de programmation, notamment le C++ et le Processing.
En général, l’Arduino UNO est un choix idéal pour les débutants et les utilisateurs expérimentés qui cherchent à développer des projets électroniques intéressants et utiles.
module Shield L293D
Le module Shield L293D est un circuit intégré qui permet de contrôler et d’alimenter des moteurs DC ou des moteurs pas à pas. Il est conçu pour être utilisé avec des microcontrôleurs tels que l’Arduino, et peut faciliter la mise en œuvre de projets de robotique et de domotique.
Le module Shield L293D dispose de :
- 4 canaux de sortie, chacun capable de contrôler un moteur DC ou un moteur pas à pas.
- Deux entrées d’alimentation pour les moteurs, ce qui permet d’alimenter des moteurs de faible puissance.
- Des broches de sortie qui peuvent être reliées aux broches de sortie d’un microcontrôleur pour contrôler les moteurs.
- Des entrées de contrôle pour contrôler la direction et la vitesse des moteurs.
Le module Shield L293D peut être utilisé avec l’Arduino UNO ou tout autre microcontrôleur compatible pour contrôler les moteurs DC. Il est facile à utiliser et à intégrer dans des projets de robotique et de domotique, car il nécessite peu de composants externes pour fonctionner.
En utilisant le module Shield L293D avec l’Arduino, vous pouvez développer des projets tels que des robots mobiles, des robots suiveurs de ligne, des robots de jeux, des robots de nettoyage, et bien plus encore. Il est important de noter que le module Shield L293D peut alimenter des moteurs de faible puissance seulement, donc si vous avez des moteurs plus puissants, vous devrez utiliser un autre type de contrôleur de moteur.
Moteur DC de 5V

Les moteurs DC de 5V sont des moteurs électriques qui fonctionnent avec une tension de 5V et peuvent être facilement contrôlés par des microcontrôleurs tels que l’Arduino UNO. Ils sont souvent utilisés dans des projets de robotique et de domotique pour alimenter des robots mobiles, des robots de suivi de ligne, des robots de jeux, des robots de nettoyage, etc.
Les moteurs DC de 5V peuvent être contrôlés en utilisant des circuits intégrés tels que le module Shield L293D. En utilisant l’Arduino UNO et le module Shield L293D, vous pouvez contrôler la direction et la vitesse du moteur en émettant des signaux numériques à partir de l’Arduino. Les moteurs DC de 5V peuvent également être utilisés avec des servomoteurs pour développer des robots mobiles plus avancés et plus précis.
Il est important de noter que les moteurs DC de 5V ont une puissance relativement faible, ce qui les rend adaptés à des applications légères telles que la manipulation de petits objets ou la démonstration de concepts. Si vous avez besoin de plus de puissance, vous devrez utiliser des moteurs DC plus puissants et un contrôleur de moteur approprié.
Batterie de 9V

Une batterie de 9 V est une source d’alimentation électrique qui fournit une tension nominale de 9 volts. Elle est souvent utilisée pour alimenter des dispositifs électroniques portables tels que des radios, des détecteurs de fumée, des calculatrices et des instruments de musique électroniques. Elle est généralement composée de six cellules sèches de 1,5 V connectées en série à l’intérieur d’un boîtier.
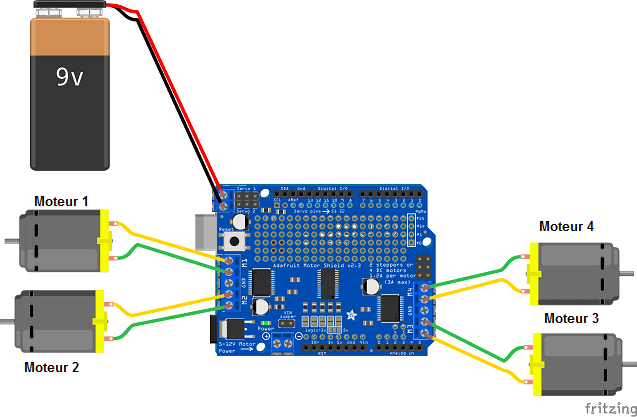
Montage :
Pour contrôler quatre moteurs DC de 5 V :
1- On branche le module L293D à la carte Arduino UNO
2- On connecte le premier moteur au port M1 du module L293D
3- On connecte le deuxième moteur au port M2 du module L293D
4- On connecte le troisième moteur au port M3 du module L293D
5- On connecte le quatrième moteur au port M4 du module L293D
Programme Arduino
Voici le programme Arduino qui permet de commander quatre moteurs par la carte Arduino et le module Shiel L293D :
Il faut importer cette bibliothèque : AFMotor
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 |
#include <AFMotor.h> AF_DCMotor motor1(1); // connecter le moteur1 au port M1 du module Shield L293D AF_DCMotor motor2(2); // connecter le moteur2 au port M2 du module Shield L293D AF_DCMotor motor3(3); // connecter le moteur3 au port M3 du module Shield L293D AF_DCMotor motor4(4); // connecter le moteur4 au port M4 du module Shield L293D void setup() { motor1.setSpeed(100); // définir la vitesse du moteur 1 motor2.setSpeed(100); // définir la vitesse du moteur 2 motor3.setSpeed(100); // définir la vitesse du moteur 1 motor4.setSpeed(100); // définir la vitesse du moteur 2 } void loop() { motor1.run(FORWARD); // le moteur 1 tourne delay(1000); motor1.run(RELEASE); // le moteur 1 s'arrete delay(500); motor2.run(FORWARD); // le moteur 2 tourne delay(1000); motor2.run(RELEASE); // le moteur 2 s'arrete delay(500); motor3.run(FORWARD); // le moteur 3 tourne delay(1000); motor3.run(RELEASE); // le moteur 3 s'arrete delay(500); motor4.run(FORWARD); // le moteur 4 tourne delay(1000); motor4.run(RELEASE); // le moteur 4 s'aarrete delay(500); motor1.run(BACKWARD); // le moteur 1 tourne dans le sens inverse delay(1000); motor1.run(RELEASE); // le moteur 1 s'arrete delay(500); motor2.run(BACKWARD);// le moteur 2 tourne dans le sens inverse delay(1000); motor2.run(RELEASE); // le moteur 2 s'arrete delay(500); motor3.run(BACKWARD); // le moteur 3 tourne dans le sens inverse delay(1000); motor3.run(RELEASE); // le moteur 3 s'arrete delay(500); motor4.run(BACKWARD);// le moteur 4 tourne dans le sens inverse delay(1000); motor4.run(RELEASE); // le moteur 4 s'arrete delay(500); } |
Vous pouvez voir aussi



0 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top