Arduino Moteur pas à pas
Commander le moteur pas à pas US-17HS4401 par Arduino et L293D
But de ce tutorial
Le moteur pas à pas US-17HS4401 est un moteur de haute qualité qui est souvent utilisé dans les projets de robotique et d’automatisation. Il est capable de fournir un couple élevé et une précision de mouvement, ce qui le rend adapté pour les applications qui nécessitent une grande précision et une grande stabilité.
Pour contrôler le moteur pas à pas US-17HS4401 avec une carte Arduino et un module L293D, vous pouvez utiliser un circuit de commande moteur pas à pas. Ce circuit utilise un ensemble de transistors pour contrôler la direction et la vitesse du moteur en modulant le courant qui y circule.
Le module L293D est un circuit intégré de contrôle de moteur qui peut être utilisé pour commander le sens de rotation du moteur pas à pas. Il peut être alimenté par une tension de 5V et est capable de fournir jusqu’à 600 mA de courant par sortie.
Pour utiliser le moteur pas à pas US-17HS4401 avec une carte Arduino et un module L293D, vous devrez connecter les broches du module L293D aux broches appropriées de la carte Arduino. Vous devrez également connecter les fils du moteur pas à pas aux broches du module L293D.
Les composants nécessaires
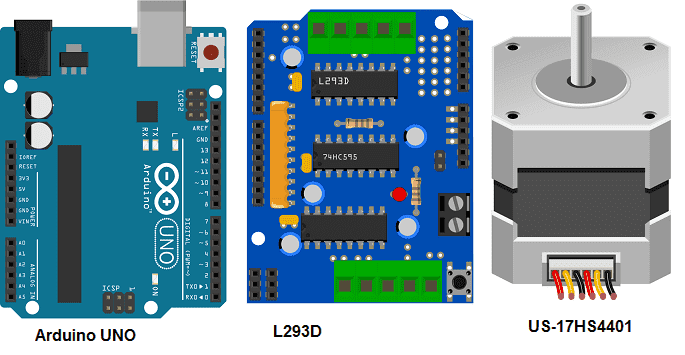
Arduino UNO

L’Arduino Uno est une carte de développement open-source conçue pour les projets électroniques. Elle est basée sur un microcontrôleur ATMega328P et dispose de 14 broches d’E/S numériques, 6 entrées analogiques, un oscillateur à quartz de 16 MHz, une interface USB, une prise d’alimentation, et une connexion ICSP pour la programmation.
L’Arduino Uno peut être programmé en utilisant l’IDE Arduino, un environnement de développement intégré qui utilise la syntaxe du langage de programmation Wiring. La carte est compatible avec une large gamme de capteurs et d’actuateurs, ce qui la rend idéale pour la réalisation de projets de robotique, de domotique, d’objets connectés et de nombreuses autres applications.
En raison de sa popularité, de nombreuses variantes et versions améliorées de l’Arduino Uno ont été développées, offrant des fonctionnalités supplémentaires telles que le Wi-Fi ou le Bluetooth intégré, une plus grande quantité de mémoire ou une vitesse de processeur plus élevée.
Module L293D
Le module Shield L293D est une carte électronique qui utilise le circuit intégré L293D pour contrôler des moteurs à courant continu ou des servomoteurs. Le L293D est un circuit intégré de puissance double pont H, qui permet de contrôler la direction et la vitesse de deux moteurs avec une tension d’alimentation allant jusqu’à 36 volts.
Le module Shield L293D est équipé de borniers de connexion pour les moteurs, d’un potentiomètre pour ajuster la vitesse, de broches d’entrée pour contrôler la direction et la vitesse, et de LEDs pour indiquer l’état de la sortie.
Le module Shield L293D peut être utilisé avec de nombreuses cartes de développement, telles que l’Arduino, pour contrôler des robots, des voitures téléguidées, des systèmes d’automatisation ou d’autres projets impliquant le contrôle de moteurs à courant continu ou de servomoteurs. En utilisant le L293D, le module Shield permet de contrôler la vitesse et la direction des moteurs de manière précise et fiable, avec une protection intégrée contre les surcharges et les courts-circuits.
Moteur pas à pas US-17HS4401

Le moteur pas à pas US-17HS4401 est un type de moteur électrique qui permet de contrôler précisément le mouvement de l’axe de rotation. Ce type de moteur est souvent utilisé dans les projets de robotique, d’automatisation et de contrôle de position.
Le moteur pas à pas US-17HS4401 est un moteur de taille moyenne qui peut fournir un couple élevé et une précision de mouvement. Il a un angle de pas de 1,8 degrés, ce qui signifie qu’il effectue une rotation complète de 360 degrés en 200 pas. Cela permet un contrôle précis du mouvement et de la position du moteur.
Le moteur pas à pas US-17HS4401 est un moteur bipolaire, ce qui signifie qu’il a quatre fils de connexion. Il doit être connecté à un contrôleur de moteur pas à pas pour être utilisé. Le contrôleur de moteur pas à pas est un circuit électronique qui permet de contrôler le mouvement du moteur en envoyant des signaux électriques précis aux enroulements du moteur.
Pour contrôler le moteur pas à pas US-17HS4401, il est nécessaire d’envoyer des signaux électriques à haute fréquence aux enroulements du moteur. Ces signaux électriques sont générés par le contrôleur de moteur pas à pas et sont utilisés pour contrôler la vitesse et la direction du moteur.
Il existe plusieurs bibliothèques logicielles disponibles pour les cartes Arduino qui permettent de contrôler facilement le moteur pas à pas US-17HS4401. Ces bibliothèques incluent des fonctions pour contrôler la vitesse, la direction et le nombre de pas du moteur.
Batterie de 9V

Une batterie de 9V est une pile électrique qui fournit une tension nominale de 9 volts. Elle est souvent utilisée pour alimenter des petits appareils électroniques tels que des jouets, des radios portables, des détecteurs de fumée, des télécommandes, des horloges, des calculatrices et des projets électroniques.
Fils de connextion

Les fils de connexion sont des câbles électriques utilisés pour connecter des composants électroniques entre eux ou à une source d’alimentation. Ils sont souvent utilisés dans les projets électroniques pour fournir une connexion électrique fiable entre les différents composants.
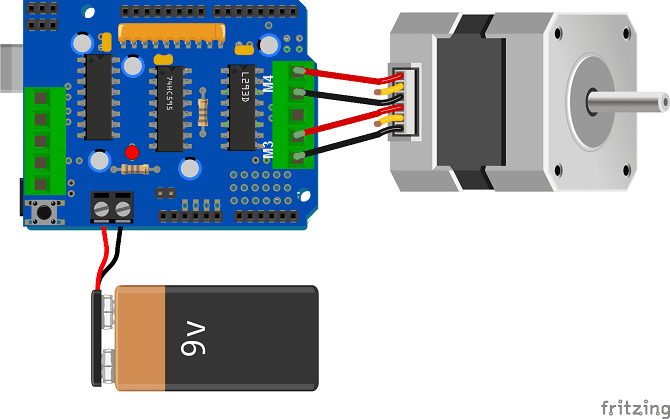
Montage
1- On connecte le module L293D à la carte Arduino UNO
2- On Connecte les broches du moteur pas à pas US-17HS4401 aux deux ports M3 et M4 du module L293D
3- On utilise une batterie de 9V comme une source d’alimentation.
Programme Arduino
Voici le programme Arduino qui permet de commander le moteur pas à pas 28BYJ-48 par la carte Arduino UNO et le module Shield L293D.
Il faut importer cette bibliothèque : AFMotor
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 |
#include <AFMotor.h> // Number of steps per output rotation // Change this as per your motor's specification const int stepsPerRevolution = 200; // connect motor to port #2 (M3 and M4) AF_Stepper motor(stepsPerRevolution, 2); void setup() { Serial.begin(9600); Serial.println("Stepper test!"); motor.setSpeed(150); // 10 rpm } void loop() { Serial.println("Single coil steps"); motor.step(50, FORWARD, SINGLE); /*motor.step(100, BACKWARD, SINGLE); Serial.println("Double coil steps"); motor.step(100, FORWARD, DOUBLE); motor.step(100, BACKWARD, DOUBLE); Serial.println("Interleave coil steps"); motor.step(100, FORWARD, INTERLEAVE); motor.step(100, BACKWARD, INTERLEAVE); Serial.println("Micrsostep steps"); motor.step(100, FORWARD, MICROSTEP); motor.step(100, BACKWARD, MICROSTEP); */ } |
Vous pouvez voir aussi



0 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top