ESP32 Ordinateur Projet
Commander une voiture équipée d’une carte ESP32 par l’ordinateur via bluetooth
But de ce projet:
Dans ce projet on va réaliser une voiture équipée d’une carte ESP32 et d’un module bluetooth hc-06 et commandée par l’ordinateur via bluetooth.
L’utilisateur commande la voiture par les touches de direction du clavier (avant, droite, gauche et arrière).
Composants nécessaires
- une carte ESP32
- un module bluetooth hc-06
- un module L298N
- un module de l’alimentaion
- des fils de connexion
- châssis de voiture
- deux roues
- deux moteurs
- une roulette
- une batterie de 9V
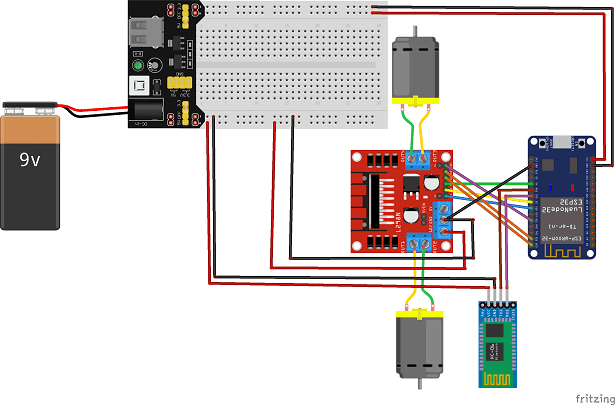
Montage de la voiture
- Connecter la broche N°5 de la carte ESP32 à la broche IN1 du module L298N.
- Connecter la broche N°4 de la carte ESP32 à la broche IN2 du module L298N.
- Connecter la broche N°23 de la carte ESP32 à la broche IN3 du module L298N.
- Connecter la broche N°22 de la carte ESP32 à la broche IN4 du module L298N.
- Connecter la broche N°18 de la carte ESP32 à la broche INA du module L298N.
- Connecter la broche N°21 de la carte ESP32 à la broche INB du module L298N.
- Connecter la broche GND de la carte ESP32 à la broche GND du module L298N.
- Connecter la broche VIN de la carte ESP32 à la borne (+) du module de l’alimentation
- Connecter la broche GND de la carte ESP32 à la borne (-) du module de l’alimentation
- Connecter la broche 12V du module L298N à la borne (+) du module de l’alimentation
- Connecter la broche TX du module HC-06 à la broche RX du ESP32
- Connecter la broche RX du module HC-06 à la broche TX du ESP32
- Connecter la broche VCC du module HC-06 à la borne (+) du module de l’alimentation
- Connecter la broche GND du module HC-06 à la borne (-) du module de l’alimentation
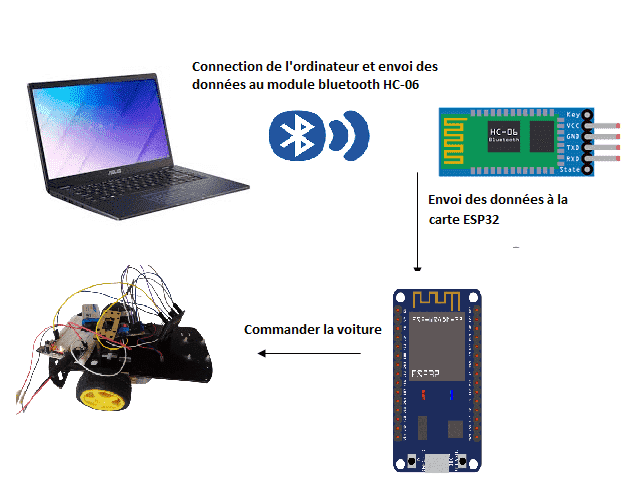
Communication entre l’ordinateur, HC-06 et la carte ESP32:
Programme micro python pour la carte ESP32
Voici le programme qui permet de connecter la carte ESP32 au module bluetooth HC-06 et de recevoir un message contenant le sens de direction de la voiture.
Ajouter ce programme dans le fichier boot.py
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |
from machine import UART from dcmotor import DCMotor from machine import Pin, PWM from time import sleep import time import utime frequency = 15000 pin1 = Pin(5, Pin.OUT) pin2 = Pin(4, Pin.OUT) pin3 = Pin(23, Pin.OUT) pin4 = Pin(22, Pin.OUT) enable = PWM(Pin(18), frequency) enable1 = PWM(Pin(21), frequency) dc_motor = DCMotor(pin1, pin2, enable) dc_motor = DCMotor(pin1, pin2, enable, 350, 1023) dc_motor1 = DCMotor(pin3, pin4, enable1) dc_motor1 = DCMotor(pin3, pin4, enable1, 350, 1023) uart = UART(2, 9600) uart.init(9600, bits=8, parity=None, stop=1) print(uart) while True: if uart.any(): while uart.any(): buf = uart.read() print(str(buf,'utf-8')) if str(buf,'utf-8')=='avant' : dc_motor.forward(100) # la voiture avance dc_motor1.forward(100) if str(buf,'utf-8')=='arriere' : dc_motor.backwards(100) # la voiture recule dc_motor1.backwards(100) if str(buf,'utf-8')=='gauche' : dc_motor.forward(10) # la voiture tourne 脿 gauche dc_motor1.forward(100) if str(buf,'utf-8')=='droite' : dc_motor.forward(100) # la voiture tourne 脿 droite dc_motor1.forward(10) if str(buf,'utf-8')=='stop' : dc_motor.stop() # la voiture tourne 脿 droite dc_motor1.stop() utime.sleep_ms(10) try: uart.write("OK") print('sent response') except OSError: pass |
Ajouter ce programme dans un fichier nommé dcmotor.py
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
class DCMotor: def __init__(self, pin1, pin2, enable_pin, min_duty=750, max_duty=1023): self.pin1=pin1 self.pin2=pin2 self.enable_pin=enable_pin self.min_duty = min_duty self.max_duty = max_duty def forward(self,speed): self.speed = speed self.enable_pin.duty(self.duty_cycle(self.speed)) self.pin1.value(1) self.pin2.value(0) def backwards(self, speed): self.speed = speed self.enable_pin.duty(self.duty_cycle(self.speed)) self.pin1.value(0) self.pin2.value(1) def stop(self): self.enable_pin.duty(0) self.pin1.value(0) self.pin2.value(0) def duty_cycle(self, speed): if self.speed <= 0 or self.speed > 100: duty_cycle = 0 else: duty_cycle = int(self.min_duty + (self.max_duty - self.min_duty)*((self.speed-1)/(100-1))) return duty_cycle |
Programme python exécuté dans l’ordinateur:
Voici le programme qui permet à l’ordinateur de connecter et envoyer des données au module bluetooth HC-06.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 |
import serial import time from pynput import keyboard evenement="" print("Start") port="COM20" #This will be different for various devices and on windows it will probably be a COM port. bluetooth=serial.Serial(port, 9600)#Start communications with the bluetooth unit print("Connected") bluetooth.flushInput() #This gives the bluetooth a little kick result = str(0) def on_key_release(key): global result #print('released %s' % key) #result ='released %s' % key+'\n' if result !='stop': #or result == str(2)+'\n' or result == str(3)+'\n' or result == str(4)+'\n': result = 'stop' print(result) result_bytes = result.encode('utf_8') bluetooth.write(result_bytes) def on_key_pressed(key): global result #print('pressed %s' % key) result1 ='%s' % key if result == 'stop': if result1=='Key.up' : result = 'avant' print(result) if result1=='Key.down' : result = 'arriere' print(result) if result1=='Key.left' : result = 'gauche' print(result) if result1=='Key.right' : result = 'droite' print(result) result_bytes = result.encode('utf_8') bluetooth.write(result_bytes) with keyboard.Listener(on_release = on_key_release,on_press=on_key_pressed) as listener: listener.join() |
Vous pouvez voir aussi


0 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top