App Inventor Arduino Projet
Commander une voiture par un smartphone et Arduino
Une voiture robot est un véhicule autonome capable de se déplacer sans intervention humaine. Elle est équipée de capteurs et de logiciels de navigation qui lui permettent de percevoir son environnement et de se déplacer de manière autonome.
Il est possible de commander une voiture à l’aide de la technologie Bluetooth en utilisant un smartphone et une carte de développement telle que l’Arduino. Voici comment procéder :
- Installez un module Bluetooth sur votre voiture. Il existe de nombreux modules Bluetooth compatibles avec les voitures, tels que le HC-05 ou le HC-06. Suivez les instructions du fabricant pour installer et configurer le module Bluetooth sur votre voiture.
- Connectez les moteurs de votre voiture au module Bluetooth. Suivez les instructions du fabricant pour connecter les fils de connexion aux broches du module Bluetooth et aux bornes des moteurs.
- Téléchargez une application Bluetooth sur votre smartphone ou votre tablette. Il existe de nombreuses applications gratuites qui vous permettent de commander votre voiture à l’aide de votre appareil mobile.
- Associez votre appareil mobile au module Bluetooth de votre voiture en suivant les instructions de l’application. Vous devrez entrer un code PIN pour établir la connexion Bluetooth entre votre appareil mobile et votre voiture.
- Utilisez l’application pour commander votre voiture. Vous pouvez utiliser l’application pour contrôler la vitesse, la direction, les lumières, etc. de votre voiture à distance.
Il est important de respecter les lois et les réglementations locales en matière de conduite et de sécurité routière lorsque vous utilisez une voiture commandée par Bluetooth. Assurez-vous également de vérifier régulièrement l’état de votre voiture et de son équipement pour éviter tout danger ou incident.
But de ce tutoriel:
Dans ce tutoriel, on va commander une voiture en utilisant la carte Arduino et un smartphone.
C’est pour cela, on va créer deux programmes: une application mobile avec App Inventor pour le smartphone et un programme pour la carte Arduino.
Composants nécessaires
carte Arduino UNO

L’Arduino UNO est une carte de développement microcontrôleur populaire utilisée pour créer des projets électroniques interactifs. Elle est basée sur le microcontrôleur ATmega328 et dispose de 14 broches d’entrée/sortie, de 6 entrées analogiques, de 2 ports série et d’un port USB pour la communication et l’alimentation.
Module Contrôleur De Moteur L293D
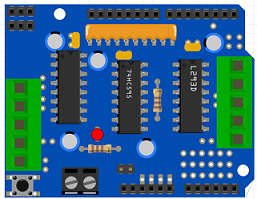
Le module contrôleur de moteur L293D est un module électronique utilisé pour contrôler des moteurs électriques DC ou des moteurs pas à pas. Il est doté de quatre canaux de commande de moteur qui peuvent être utilisés indépendamment ou en tandem pour contrôler jusqu’à quatre moteurs.
Module Bluetooth HC-06
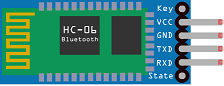
Le module Bluetooth HC-06 est un module de communication sans fil utilisé pour établir une connexion Bluetooth entre deux appareils. Il est souvent utilisé avec des cartes de développement comme l’Arduino pour créer des projets de domotique, de robotique ou d’IoT (Internet des objets).
Kit robot voitures de 2 roues

Un kit robot voiture à deux roues est un ensemble de pièces et de composants qui permet de construire un robot mobile à deux roues. Ces kits sont généralement destinés aux débutants en robotique et sont conçus pour être faciles à utiliser et à assembler.
Les kits robot voiture à deux roues comprennent généralement un châssis de robot, des roues et des moteurs pour propulser le robot, ainsi qu’un contrôleur de moteur et un microcontrôleur pour commander le robot. Ils peuvent également inclure des capteurs et des modules de communication pour permettre au robot de naviguer et de détecter son environnement.
Pour utiliser un kit robot voiture à deux roues, il faut d’abord assembler le robot en suivant les instructions du manuel. Une fois le robot assemblé, vous pouvez le programmer pour qu’il effectue différentes tâches, comme suivre une ligne, éviter des obstacles ou se déplacer vers un emplacement précis.
Les kits robot voiture à deux roues sont une excellente introduction à la robotique et peuvent être utilisés pour enseigner la programmation et la robotique de manière interactive et ludique. Ils sont également idéaux pour les projets de loisirs et pour la création de robots de compétition.
Le kit robot utilisé dans ce projet est composé de :
- châssis de voiture.
- 2 moteurs à engrenages
- 2 pneus de voiture
- 1 roue universelle
des fils de connexion

Les fils de connexion sont essentiels pour relier les composants électroniques dans un circuit électronique, y compris une carte Arduino. Il existe différents types de fils de connexion en fonction de leur application, comme les fils à gaine thermorétractable, les fils à cosse et les fils tressés.
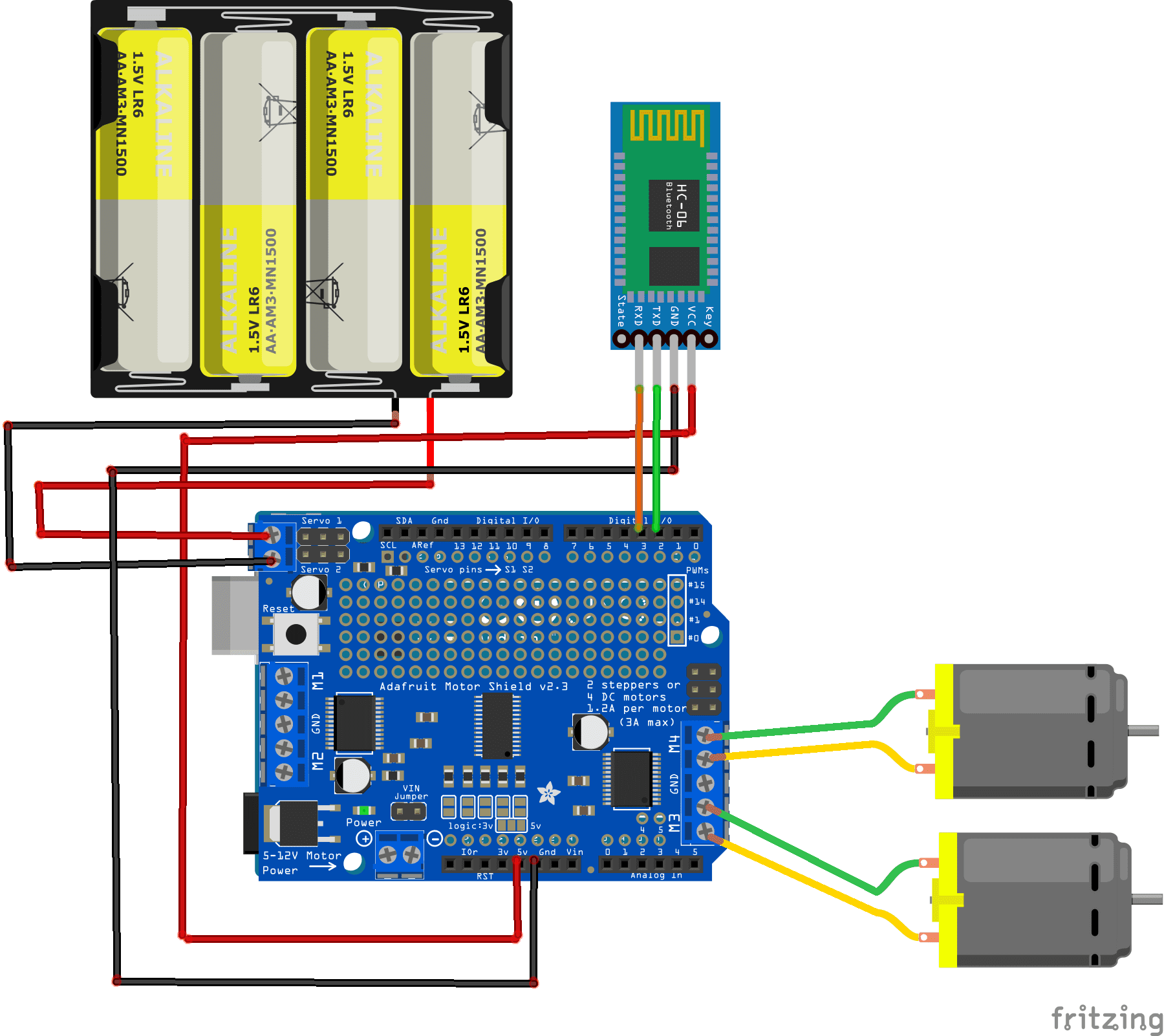
Montage
Programme Arduino
Voici le programme qui permet de connecter la carte Arduino au smartphone et de recevoir un message contenant l’ordre de commandement de la voiture.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 |
#include <SoftwareSerial.h> #include <AFMotor.h> AF_DCMotor motor1(3); AF_DCMotor motor2(4); SoftwareSerial hc06(2,3); String cmd=""; void setup(){ motor1.setSpeed(150); motor2.setSpeed(150); //Initialize Serial Monitor Serial.begin(9600); //Initialize Bluetooth Serial Port hc06.begin(9600); } void loop(){ //Read data from HC06 while(hc06.available()>0){ cmd+=(char)hc06.read(); } //Select function with cmd if(cmd!=""){ Serial.print("Command recieved : "); Serial.println(cmd); // We expect ON or OFF from bluetooth if(cmd=="avant"){ motor1.run(FORWARD); // faire avancer la voiture motor2.run(FORWARD); } if(cmd=="arriere"){ motor1.run(BACKWARD);// faire reculer la voiture motor2.run(BACKWARD); } if(cmd=="gauche"){ motor1.run(FORWARD); // faire tourner la voiture à gauche } if(cmd=="droite"){ motor2.run(FORWARD); // faire tourner la voiture à droite } if(cmd=="stop"){ motor1.run(RELEASE); // arrêter la voiture motor2.run(RELEASE); } cmd=""; //reset cmd } delay(100); } |
Création de l’application avec App Inventor:
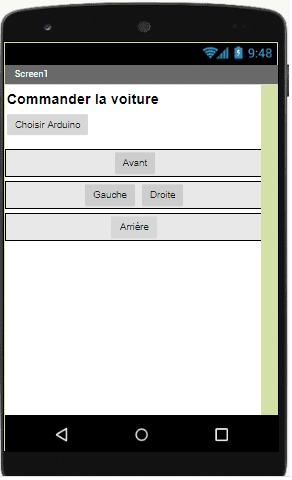
On va créer une application mobile nommée ‘commander_voiture_arduino’ avec App Inventor qui permet de commander la voiture par le smartphone.
On vous propose donc de réaliser le design de l’application, avec le visuel suivant:
Programmation avec App Inventor
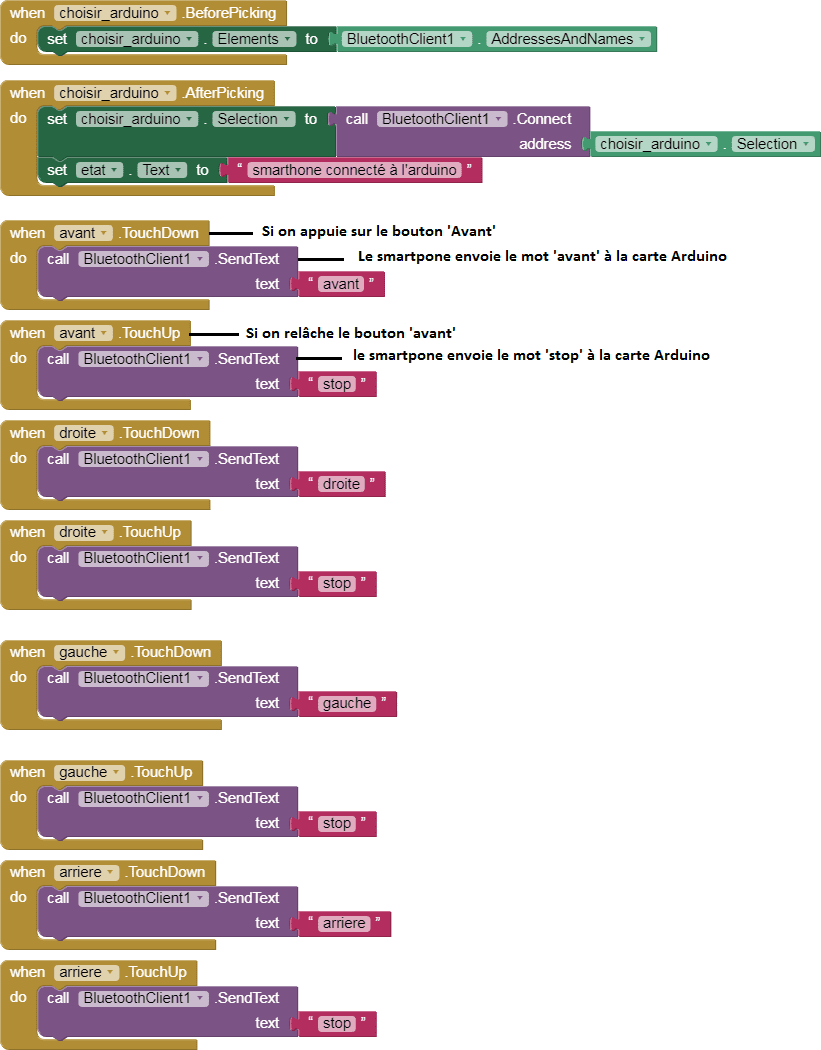
Pour programmer l’application, App Inventor nous propose d’utiliser L’espace Blocs qui permet de créer un programme sous forme de schéma bloc. Très simple d’utilisation mais nécessitant un peu de logique de programmation.
Voici le programme de l’application réalisée dans l’espace Blocs de l’App Inventor:
Vous pouvez voir aussi



4 commentaires
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top
Majdi 04-10-2222
Bonjour, je n'arrive pas a me connecter a mon Mbot via Bluetooth or qu'il est allumé donc j'aimerais savoir si vous avez une explication à ça. Merci.
spider 20-05-2222
Bonjour, j'aurais une question par rapport à la fonction etat dans le deuxième bloc. Quel est l'element ou la zone du code qui est nommé etat? cordialement, avec mes salutation distinguer
Arduino 04-05-2222
C'est bien !
nintcheu 31-01-2222
par mal