Arduino Moteur pas à pas
Contrôler le moteur pas à pas par l’Arduino
Le moteur pas à pas est un moteur à courant continu sans balais dans lequel la rotation est divisée en un certain nombre de pas qui résultent de la structure du moteur.
Un moteur pas à pas est un type de moteur électrique qui peut être contrôlé de manière précise en utilisant des impulsions électriques. Il est souvent utilisé dans les applications de positionnement précis, telles que les imprimantes 3D, les robots et les systèmes de contrôle de mouvement.
Le moteur pas à pas est constitué de deux parties principales : un rotor et un stator. Le rotor est un aimant permanent qui peut être divisé en plusieurs sections, chacune étant polarisée de manière différente. Le stator est un enroulement de fils électriques qui peut être alimenté par une tension électrique. Lorsque le stator est alimenté par une tension électrique, il crée un champ magnétique qui attire ou repousse le rotor, ce qui entraîne le mouvement du moteur.
Il existe deux principaux types de moteurs pas à pas : les moteurs pas à pas à aimant permanent et les moteurs pas à pas bipolaires. Les moteurs pas à pas à aimant permanent ont un rotor constitué d’aimants permanents, tandis que les moteurs pas à pas bipolaires ont un rotor constitué de bobines.
But de ce tutoriel:
Dans ce tutoriel, on va commander un moteur pas à pas par la carte Arduino: le moteur pas à pas tourne dans le sens de l’aiguille puis il tourne dans le sens inverse.
Composants nécessaires
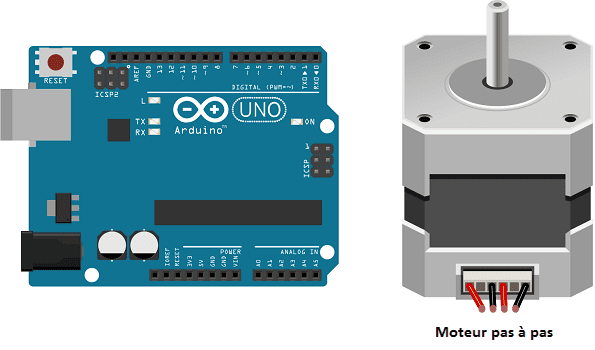
carte Arduino

Une carte Arduino est une carte de développement électronique basée sur un microcontrôleur. Elle est conçue pour être facilement utilisable par les développeurs et les hobbyistes pour créer des projets électroniques.
Les cartes Arduino sont principalement utilisées pour contrôler des appareils électroniques en utilisant du code informatique, mais elles peuvent également être utilisées pour traiter et afficher des données. Elles sont souvent utilisées dans des projets de robotique, de domotique, de domaine de l’Internet des objets (IoT) et dans de nombreux autres domaines de l’électronique de loisir et professionnelle.
moteur pas à pas 17HS4401

Le moteur pas à pas 17HS4401 est un type de moteur pas à pas à aimant permanent qui est souvent utilisé dans les applications de positionnement précis. Il est caractérisé par sa taille compacte, sa haute précision et sa faible consommation d’énergie.
Le moteur pas à pas 17HS4401 est constitué d’un rotor constitué d’aimants permanents et d’un stator constitué de bobines de fils électriques. Il est alimenté par une tension de 5 V à 12 V et peut être contrôlé en envoyant des impulsions électriques au stator via un microcontrôleur ou un ordinateur.
Pour utiliser le moteur pas à pas 17HS4401, vous devez d’abord le connecter à un microcontrôleur ou à un ordinateur en suivant le schéma de câblage recommandé. Vous pouvez ensuite écrire du code pour contrôler le moteur en envoyant des impulsions électriques au stator en utilisant une bibliothèque de logiciels ou une API de bas niveau. Vous pouvez ajuster la vitesse et le sens de rotation du moteur en modifiant la fréquence et la polarité des impulsions électriques.
Il est important de suivre les instructions du fabricant et de respecter les précautions de sécurité lors de l’utilisation du moteur pas à pas 17HS4401.
carte CNC
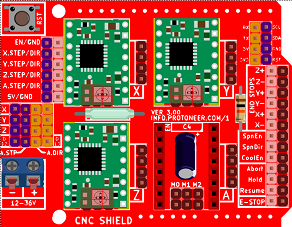
Une carte CNC (Computer Numerical Control) est un composant électronique utilisé pour contrôler les mouvements d’une machine-outil CNC (Computer Numerical Control). Elle permet de transformer les codes G (un langage de programmation utilisé pour décrire les mouvements de la machine) en impulsions électriques qui sont envoyées aux moteurs pas à pas ou aux servomoteurs qui commandent les mouvements de la machine.
Une carte CNC est généralement connectée à un ordinateur via un port USB ou une interface réseau, et utilise un logiciel de contrôle de la machine pour envoyer les codes G et recevoir les données de positionnement en retour. Elle peut être utilisée avec une variété de machines-outils, telles que les fraiseuses, les tourneuses et les imprimantes 3D.
Pour utiliser une carte CNC, vous devez d’abord la connecter à un ordinateur et à la machine-outil en suivant le schéma de câblage recommandé. Vous pouvez ensuite utiliser un logiciel de contrôle de la machine pour envoyer des codes G et contrôler les mouvements de la machine. Il est important de suivre les instructions du fabricant et de respecter les précautions de sécurité lors de l’utilisation d’une carte CNC.
batterie de 9V

Une batterie de 9 volts est une pile qui fournit une tension de sortie de 9 volts. Elles sont souvent utilisées dans les appareils électroniques portables tels que les radiodiffuseurs, les jouets et les outils électroniques. Elles sont également couramment utilisées dans les applications de bricolage et de loisir, telles que les circuits électroniques et les projets de robotique.
des fils de connexion

Les fils de connexion sont des fils électriques utilisés pour connecter des composants électroniques à une carte de développement ESP32. Ils sont généralement utilisés pour connecter des capteurs, des actionneurs, des afficheurs et d’autres composants à la carte ESP32 afin de créer des circuits électroniques.
Il existe deux types de fils de connexion: les fils de connexion mâle-mâle et les fils de connexion mâle-femelle. Les fils de connexion mâle-mâle sont utilisés pour connecter des composants qui ont tous deux des broches mâles, tandis que les fils de connexion mâle-femelle sont utilisés pour connecter des composants avec une broche mâle et une broche femelle.
Les fils de connexion sont généralement fabriqués en cuivre ou en alliage de cuivre et sont revêtus d’un isolant en plastique pour protéger les fils électriques et empêcher les courts-circuits. Ils sont disponibles dans une variété de couleurs pour aider à identifier et organiser les différents fils dans un circuit.
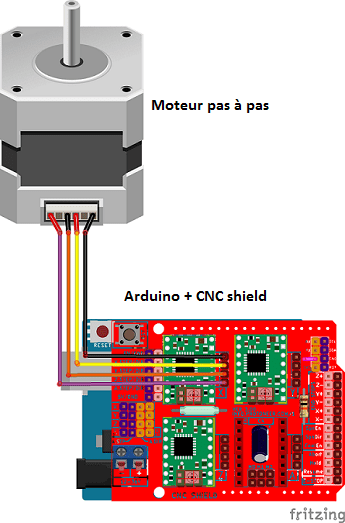
Montage de la carte Arduino avec le moteur pas à pas
Tout d’abord, il faut connecter la carte Arduino à la care CNC. Ensuite, on branche le moteur pas à pas à la carte CNC.
Programme Arduino
Voici le programme qui permet de commander le moteur pas à pas par la carte Arduino.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 |
// pour la configuration du moteur pas à pas const int StepX = 2; const int DirX = 5; int pulseWidthMicros = 1000; // microseconds int millisBtwnSteps = 15000; void setup() { pinMode(StepX,OUTPUT); pinMode(DirX,OUTPUT); } void loop() { translationX(LOW,HIGH,100); //faire tourner le moteur pas à pas dans le sens de l'aiguille delay(1000); translationX(HIGH,LOW,100); //faire tourner le moteur pas à pas dans le sens de inverse l'aiguille delay(1000); } void translationX (uint8_t pin1, uint8_t pin2,int stepsPerRev1){ digitalWrite(DirX, pin1); // Enables the motor to move in a particular direction // Makes 200 pulses for making one full cycle rotation for (int i = 0; i < stepsPerRev1; i++) { digitalWrite(StepX, pin1); delayMicroseconds(pulseWidthMicros); digitalWrite(StepX, pin2); delayMicroseconds(millisBtwnSteps); } } |
Vous pouvez voir aussi



1 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top
philippe 05-06-2222
je suis a la recherche du meme programe que sa la mais il faudrait qu'il face un allee et retoure. en gros lorsque que je donne un impulsion sur un bouton poussoir il faudrait qu'il face un allée et retour et s'arret et qui recomence au prochain impulsion.