App Inventor Arduino Bras robotique Projet
Contrôler un bras robotique avec Arduino et Smartphone
Un bras robotique est un dispositif mécanique qui imite le mouvement et la manipulation des bras humains. Il est généralement utilisé pour effectuer des tâches délicates et répétitives dans un environnement industriel ou de laboratoire.
Un bras robotique est généralement constitué d’une base, d’un ou plusieurs bras articulés et d’une pince ou d’un autre outil de manipulation. Il est contrôlé par un ordinateur ou une carte de commande qui envoie des instructions de mouvement aux différents moteurs et servomoteurs qui actionnent les articulations du bras.
Il existe de nombreux types de bras robotiques différents, qui varient en fonction de leur taille, de leur capacité de manipulation et de leur environnement de travail. Les bras robotiques peuvent être utilisés dans de nombreuses applications, notamment la production industrielle, l’assemblage de pièces, la manipulation de matériaux et la recherche scientifique.
En résumé, un bras robotique est un dispositif mécanique contrôlé par ordinateur qui permet de manipuler des objets dans un environnement industriel ou de laboratoire. Il est utilisé pour effectuer des tâches délicates et répétitives de manière précise et efficace.
But de ce projet:
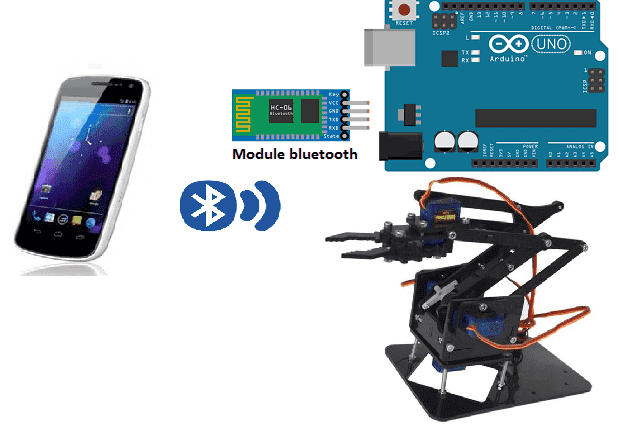
Il est possible de contrôler un bras robotique en utilisant une carte Arduino et un smartphone via Bluetooth. Voici les étapes générales à suivre pour réaliser cela :
- Vous aurez besoin de tous les matériaux nécessaires, notamment une carte Arduino, un module Bluetooth HC-06, des servomoteurs, des pièces mécaniques (comme des bras articulés et des charnières), des câbles et divers composants électroniques. Assurez-vous de disposer de tout ce dont vous avez besoin avant de commencer.
- Commencez par assembler le matériel en suivant les instructions du fabricant des servomoteurs et en utilisant les pièces mécaniques pour construire le bras articulé. Connectez le module Bluetooth à la carte Arduino en suivant les instructions du fabricant. Assurez-vous de connecter correctement tous les composants et de vérifier que tout fonctionne correctement.
- Téléchargez et installez le logiciel de développement intégré (IDE) Arduino sur votre ordinateur. Ouvrez-le et créez un nouveau sketch (programme).
- Écrivez le code pour contrôler les servomoteurs et faire bouger le bras robotique en fonction de vos besoins. Vous pouvez utiliser les bibliothèques intégrées pour les servomoteurs et le Bluetooth dans l’IDE Arduino pour faciliter le contrôle des moteurs et la communication Bluetooth.
Dans ce projet, on va commander un bras robotique en utilisant la carte Arduino et un smartphone.
C’est pour cela, on va créer deux programmes: une application mobile avec App Inventor pour le smartphone et un programme Arduino.
Composants nécessaires
carte Arduino

Une carte Arduino est une carte de développement électronique basée sur un microcontrôleur. Elle est conçue pour être facilement utilisable par les développeurs et les hobbyistes pour créer des projets électroniques.
Les cartes Arduino sont principalement utilisées pour contrôler des appareils électroniques en utilisant du code informatique, mais elles peuvent également être utilisées pour traiter et afficher des données. Elles sont souvent utilisées dans des projets de robotique, de domotique, de domaine de l’Internet des objets (IoT) et dans de nombreux autres domaines de l’électronique de loisir et professionnelle.
Module bluetooth HC-06
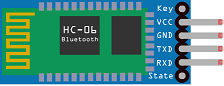
Le module Bluetooth HC-06 est un appareil de communication sans fil qui permet de connecter des appareils électroniques via Bluetooth. Il est généralement utilisé pour transmettre des données entre des cartes de développement comme les cartes Arduino et des appareils externes, tels que des smartphones ou des ordinateurs.
Kit bras robotique

Un kit bras robotique est un ensemble de composants et d’instructions qui vous permet de construire un bras robotique de manière relativement simple. Les kits de bras robotiques sont généralement conçus pour les débutants et incluent tout ce dont vous avez besoin pour assembler le bras robotique, y compris les pièces mécaniques, les servomoteurs, les câbles et tous les autres composants électroniques nécessaires.
Montage:
Pour faire le montage, on a connecté:
- le servomoteur responsable de l’orientation du bras robotique vers le bas ou vers le haut à la broche 6 de la carte Arduino.
- le servomoteur responsable de l’orientation du bras robotique vers le gauche ou vers la droite ou vers le gauche à la broche 5 de la carte Arduino.
- le servomoteur responsable de l’ouverture du pince du bras robotique à la broche 4 de la carte Arduino.

Programme
Voici le programme qui permet de connecter la carte Arduino au smartphone et de recevoir un message contenant l’ordre de commandement du bras robotique.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 |
#include <SoftwareSerial.h> #include <Servo.h> Servo servoBase,servoPince,servohautbas; // create servo object to control a servo int servoBasepos=60; int servoPincepos=0; int servohautbaspos=120; SoftwareSerial hc06(2,3); String cmd=""; void setup(){ //Initialize Serial Monitor Serial.begin(9600); servoPince.attach(4); // attaches the servo on pin 2 to the servo object servoBase.attach(5); // attaches the servo on pin 1 to the servo object servohautbas.attach(6); servoPince.write(servoPincepos); servoBase.write(servoBasepos); servohautbas.write(120); //Initialize Bluetooth Serial Port hc06.begin(9600); } void loop(){ //Read data from HC06 while(hc06.available()>0){ cmd+=(char)hc06.read(); } //Select function with cmd if(cmd!=""){ if(cmd=="ouvrir"){ Serial.println(cmd); if (servoPincepos<68) { servoPincepos=servoPincepos+2; servoPince.write(servoPincepos); Serial.println(servoPincepos); } } if(cmd=="fermer"){ if (servoPincepos>7) { servoPincepos=servoPincepos-7; servoPince.write(servoPincepos); Serial.println(servoPincepos); } } if(cmd=="droite"){ if (servoBasepos<117) { servoBasepos=servoBasepos+3; servoBase.write(servoBasepos); } } if(cmd=="gauche"){ if (servoBasepos>3) { servoBasepos=servoBasepos-3; servoBase.write(servoBasepos); } } if(cmd=="haut"){ if (servohautbaspos<155) { servohautbaspos=servohautbaspos+5; servohautbas.write(servohautbaspos); } } if(cmd=="bas"){ if (servohautbaspos>105) { servohautbaspos=servohautbaspos-5; servohautbas.write(servohautbaspos); //delay(10); } } if((cmd=="hautstop")||(cmd=="basstop")||(cmd=="gauchestop")||(cmd=="droitestop")||(cmd=="ouvrirstop")||(cmd=="fermerstop")){ cmd=""; } } delay(100); } |
Création de l’application avec App Inventor:
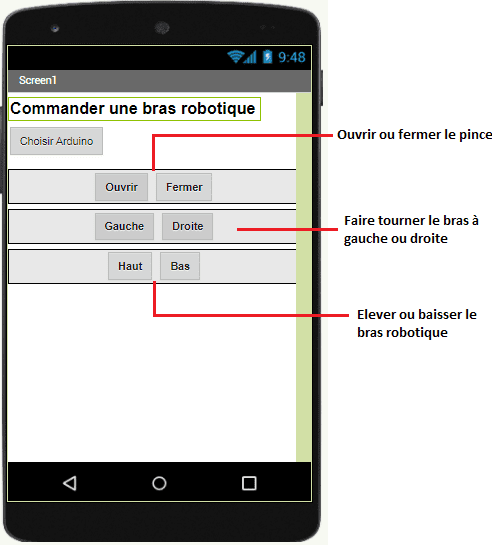
On va créer une application mobile nommée ‘Commander_bras_arduino’ avec App Inventor qui permet de commander un bras automatique par le smartphone.
On vous propose donc de réaliser le design de l’application, avec le visuel suivant:
Programmation avec App Inventor
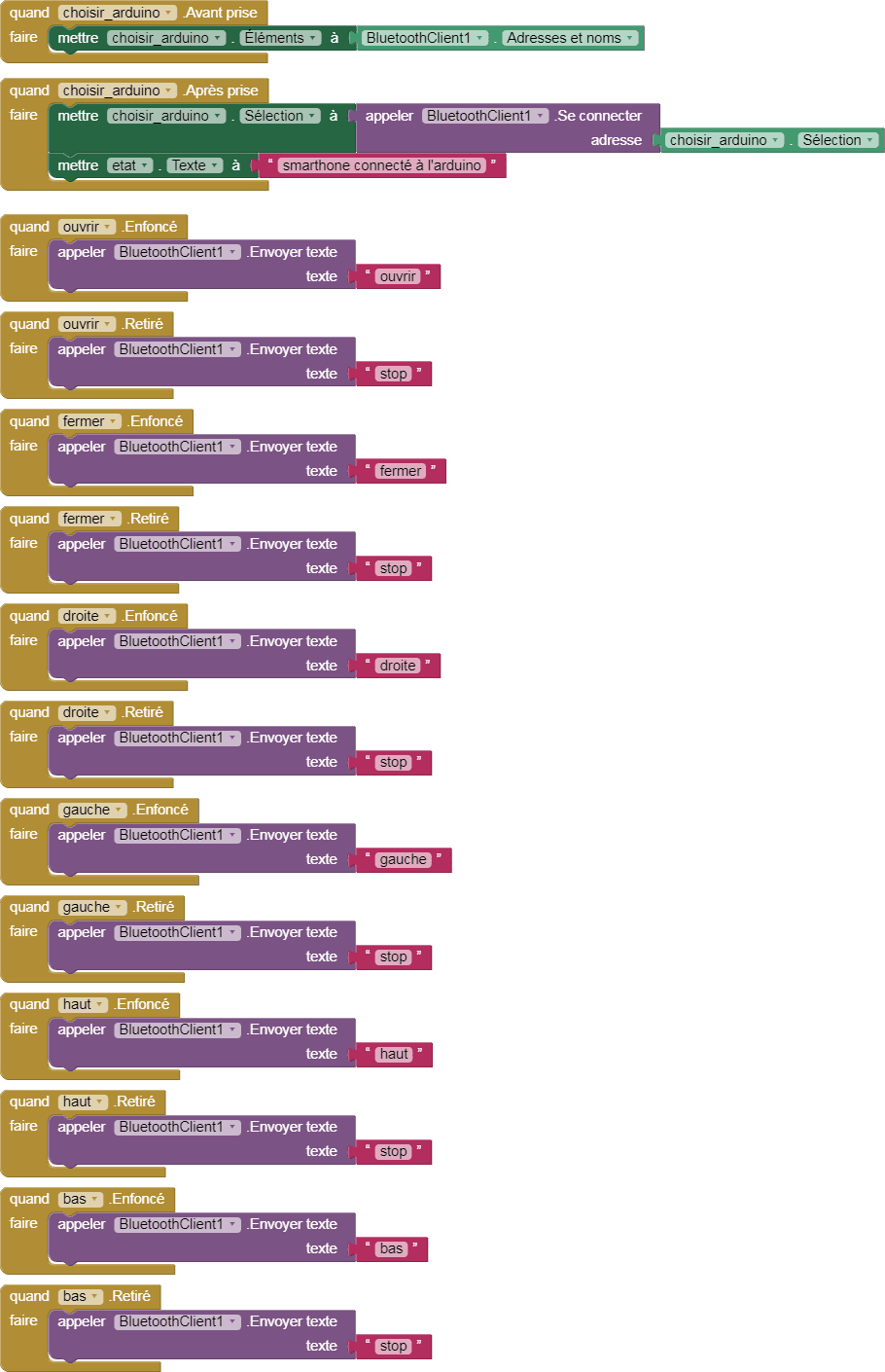
Pour programmer l’application, App Inventor nous propose d’utiliser L’espace Blocs qui permet de créer un programme sous forme de schéma bloc. Très simple d’utilisation mais nécessitant un peu de logique de programmation.
Voici le programme de l’application réalisée dans l’espace Blocs de l’App Inventor:
Vous pouvez voir aussi



0 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top