Maqueen Micro:bit Ordinateur Projet
Piloter un robot Maqueen [Micro:bit] par l’ordinateur via bluetooth
But de ce projet:
Ce tutoriel a pour but de contrôler le mouvement du Maqueen par l’ordinateur via bluetooth.
Les touches des directions du clavier permettent au Maqueen d’aller en avant, en arrière, à gauche et à droite.
Grâce à la matrice à LEDs de la carte micro:bit, on affichera la direction que prend le Maqueen.
Matériels nécessaires
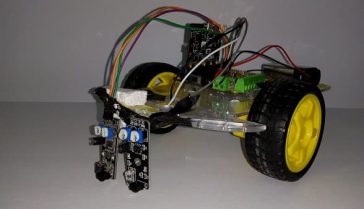
Il nous faudra une carte micro:bit, un robot Maqueen, un module bluetooth HC-06 et un ordinateur équipé du bluetooth.
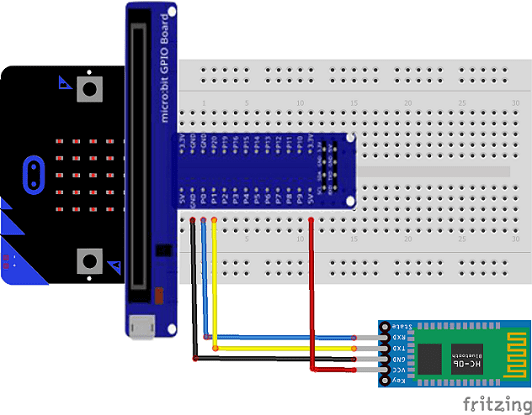
Montage de la carte Micro:bit avec le module bluetooth HC-06:
il faut connecter :
- la broche VCC du module HC-06 à une énergie de 5V
- la broche GND du module HC-06 à GND de la carte Micro:bit
- la broche RX du module HC-06 à la broche P0 de la carte Micro:bit
- la broche TR du module HC-06 à la broche P1 de la carte Micro:bit
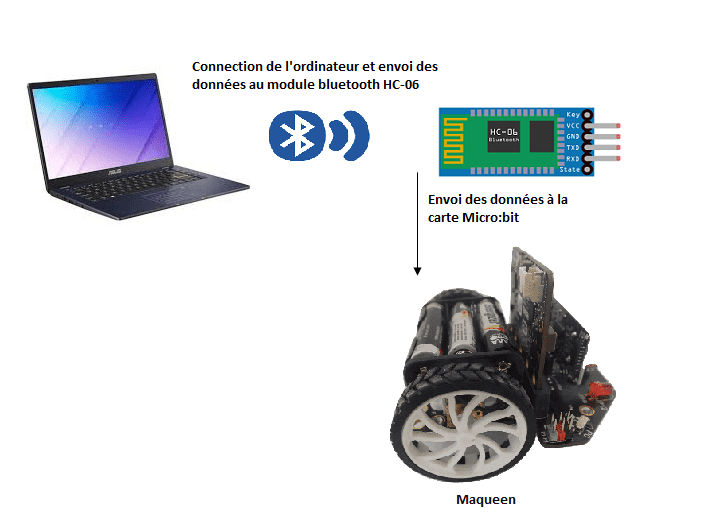
Communication de l’ordinateur avec le module HC-06 et la carte Micro:bit
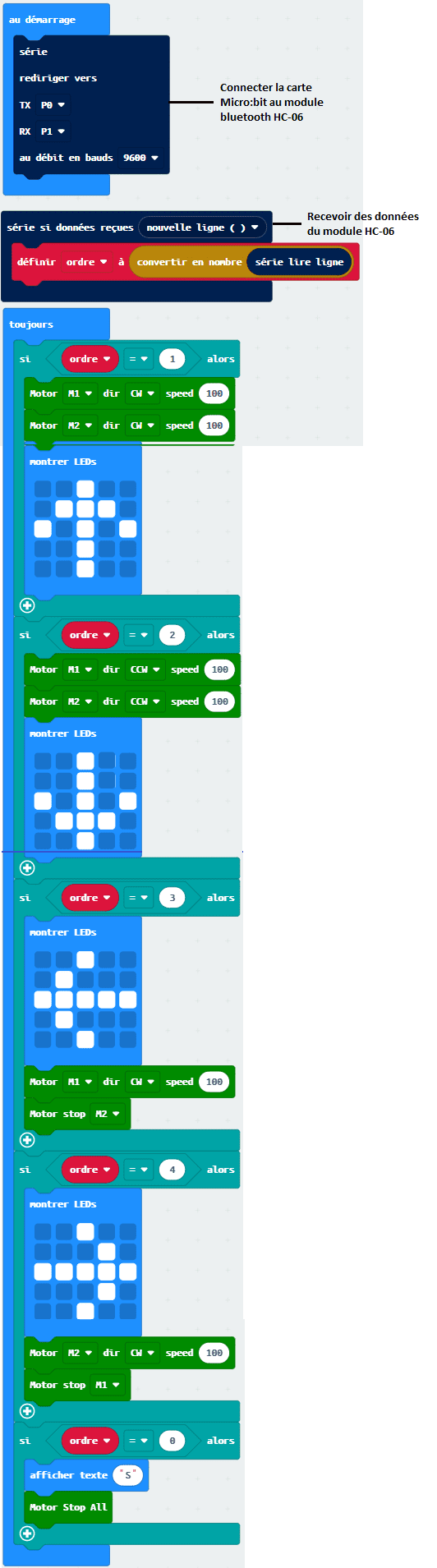
Programme makecode
Voici le programme makecode qui permet de recevoir des données du module bluetooth HC-06 et commander le robot Maqueen.
Programme Python exécuté par l’ordinateur:
Voici le programme python qui permet de connecter l’ordinateur et d’envoyer des données au module bluetooth HC-06:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 |
import serial import time from pynput import keyboard evenement="" print("Start") port="COM20" #This will be different for various devices and on windows it will probably be a COM port. bluetooth=serial.Serial(port, 9600)#Start communications with the bluetooth unit print("Connected") bluetooth.flushInput() #This gives the bluetooth a little kick result = str(0)+'\n' def on_key_release(key): global result #print('released %s' % key) #result ='released %s' % key+'\n' if result != str(0)+'\n': #or result == str(2)+'\n' or result == str(3)+'\n' or result == str(4)+'\n': result = str(0)+'\n' print(result) result_bytes = result.encode('utf_8') bluetooth.write(result_bytes) def on_key_pressed(key): global result print('pressed %s' % key) result1 ='%s' % key if result == str(0)+'\n': if result1=='Key.up' : result = str(1)+'\n' print(result) if result1=='Key.down' : result = str(2)+'\n' print(result) if result1=='Key.left' : result = str(3)+'\n' print(result) if result1=='Key.right' : result = str(4)+'\n' print(result) result_bytes = result.encode('utf_8') bluetooth.write(result_bytes) with keyboard.Listener(on_release = on_key_release,on_press=on_key_pressed) as listener: listener.join() |
Vous pouvez voir aussi


0 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top