Présentation de la barrière de parking automatique
Une barrière de parking automatique est un dispositif de gestion de l’accès à un parking qui contrôle l’entrée et la sortie des véhicules en utilisant un système automatisé. Elles sont souvent utilisées dans les parkings privés ou payants pour contrôler l’accès et gérer le paiement des frais de stationnement.
Les barrières de parking automatiques sont généralement actionnées par un moteur électrique et peuvent être contrôlées à distance via une télécommande ou un lecteur de badge. Certaines barrières de parking automatiques sont équipées de capteurs de présence ou de détecteurs de mouvement pour ouvrir et fermer automatiquement la barrière lorsqu’un véhicule approche ou s’éloigne.
Il existe de nombreux avantages à utiliser une barrière de parking automatique, notamment la réduction des temps d’attente pour entrer ou sortir du parking, la gestion efficace de l’accès et la possibilité de contrôler le paiement des frais de stationnement. Cependant, il est important de s’assurer que la barrière est correctement installée et entretenue afin de garantir son bon fonctionnement et d’éviter tout problème de sécurité.
But de la barrière de parking automatique commandé par Arduino:
Dans ce projet on allons simuler une barrière de parking automatisée avec Arduino. Cette maquette reprend le fonctionnement général des systèmes automatisés qui permettent l’accès aux parcs publiques que l’on trouve les dans les gares, aéroports, cinémas, supermarchés, etc.
Notre barrière s’ouvre à l’aide d’un servomoteur lorsque le capteur sonore HC-SR04 détecte une véhicule et se ferme automatiquement dans le cas contraire.
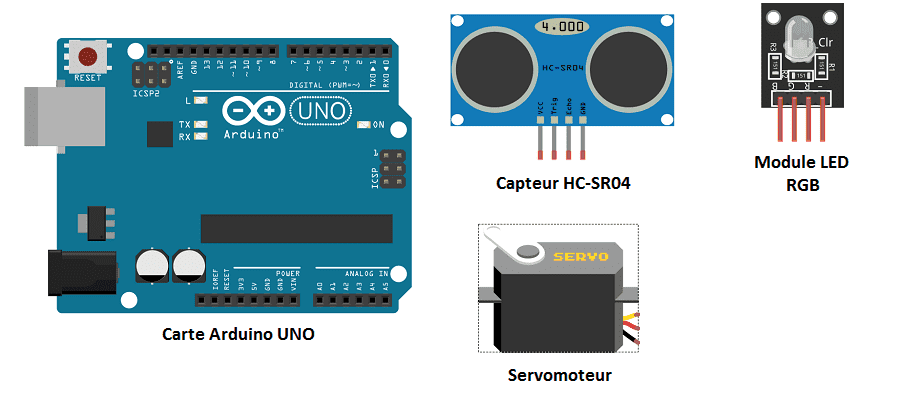
Composants nécessaires
carte Arduino

Arduino est une plateforme de développement de matériel et de logiciel open source qui permet aux utilisateurs de créer des projets électroniques en utilisant une variété de capteurs, de moteurs et d’autres composants électroniques. La plateforme Arduino est basée sur un microcontrôleur, également appelé carte Arduino, qui exécute le code écrit par l’utilisateur et interagit avec les autres composants électroniques connectés à la carte.
deux capteurs sonore HC-SR04
Le capteur HC-SR04 est un capteur de distance ultrasonique couramment utilisé dans les projets électroniques. Il mesure la distance en envoyant un signal ultrasonique et en mesurant le temps qu’il lui faut pour rebondir sur un objet et retourner au capteur. Le capteur HC-SR04 est capable de mesurer des distances allant de 2 cm à 400 cm avec une précision de 3 mm.
un module LED RGB
Un module LED RGB est un module électronique qui contient une ou plusieurs LED (diodes électroluminescentes) de couleur rouge, verte et bleue. Ces LED peuvent être utilisées ensemble pour produire une large gamme de couleurs en mélangeant différentes quantités de rouge, vert et bleu.
un servomoteur

Un servomoteur est un moteur électrique qui peut être contrôlé avec précision pour effectuer des mouvements de rotation à un angle spécifique. Ils sont souvent utilisés dans les projets de robotique et de mécanique pour contrôler la position et le mouvement de différents éléments, tels que les bras de robots, les roues de véhicules télécommandés et les mécanismes de verrouillage.
une barrière sous forme d’un stylo
une plaque d’essai

Une plaque d’essai est un type de carte de développement électronique qui permet aux développeurs de tester et de prototyper facilement des circuits électroniques. Elles sont souvent utilisées par les développeurs pour tester rapidement des idées et des conceptions avant de les intégrer à un projet plus important ou de les intégrer dans une carte de développement plus permanente.
des fils de connexion

Les fils de connexion sont des fils électriques utilisés pour connecter des composants électroniques à une carte de développement Arduino. Ils sont généralement utilisés pour connecter des capteurs, des actionneurs, des afficheurs et d’autres composants à la carte Arduino afin de créer des circuits électroniques.
Il existe deux types de fils de connexion: les fils de connexion mâle-mâle et les fils de connexion mâle-femelle. Les fils de connexion mâle-mâle sont utilisés pour connecter des composants qui ont tous deux des broches mâles, tandis que les fils de connexion mâle-femelle sont utilisés pour connecter des composants avec une broche mâle et une broche femelle.
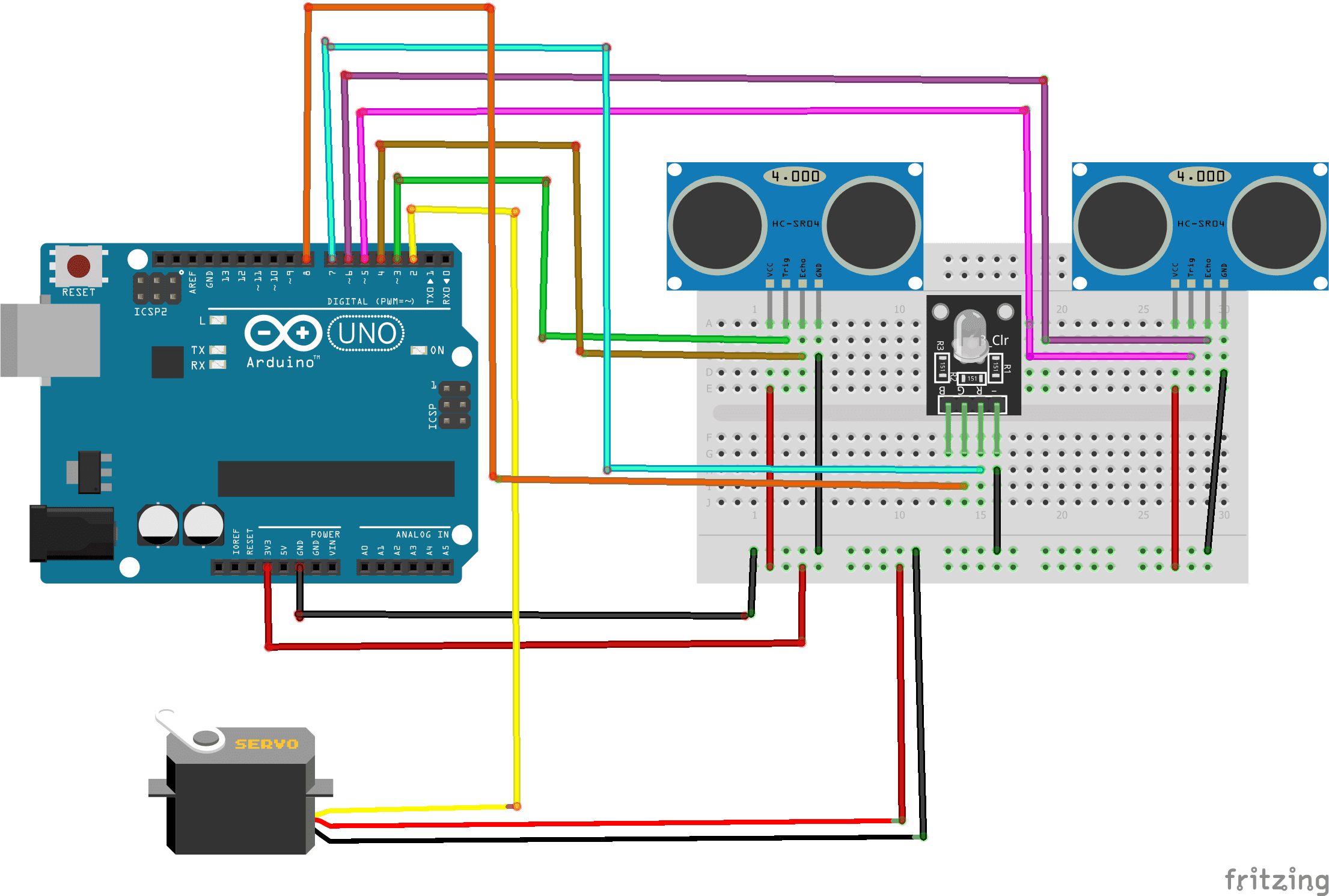
Montage du Parking
Pour réaliser le montage, on peut connecter
Pour le premier capteur sonore HC-SR04 :
- la broche VCC à la borne 3.3V de l’Arduino
- la broche Trig à la borne numérique N°3 de l’Arduino
- la broche ECHO à la borne numérique N°4 de l’Arduino
- la broche GND à la borne GND de l’Arduino
Pour le deuxième capteur sonore HC-SR04 :
- la broche VCC à la borne 3.3V de l’Arduino
- la broche Trig à la borne numérique N°5 de l’Arduino
- la broche ECHO à la borne numérique N°6 de l’Arduino
- la broche GND à la borne GND de l’Arduino
Pour le servomoteur:
- fil rouge : fil de l’alimentation à relier à la borne 5V de l’Arduino
- fil marron : fil à relier à la borne GND de l’Arduino
- fil Jaune : fil de signal de positionnement branché à la borne numérique N°2 de l’Arduino
Pour Module LED RGB:
- la borne numérique N°7 de l’Arduino à la broche (R) pour la couleur rouge du module LED RGB
- la borne numérique N°8 de l’Arduino à la broche (G) pour la couleur vert du module LED RGB
- la borne GND de l’Arduino à la broche (GND) du module LED RGB
Programme
Voici le programme pour le système de parking automatisé:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 |
#include <HCSR04.h> /* Inclut la lib Servo pour manipuler le servomoteur */ #include <Servo.h> /* Créer un objet Servo pour contrôler le servomoteur */ Servo monServomoteur; const int servoPin=2; const int trig1Pin = 3; const int echo1Pin = 4; const int trig2Pin = 5; const int echo2Pin = 6; const int LEDrouge=7; const int LEDvert=8; int position = 180; // initialisation du 1er capteur avec les broches utilisees. UltraSonicDistanceSensor distanceSensor1(trig1Pin, echo1Pin); // initialisation du 2eme capteur avec les broches utilisees. UltraSonicDistanceSensor distanceSensor2(trig2Pin, echo2Pin); void setup(){ monServomoteur.attach(servoPin); pinMode(LEDrouge,OUTPUT); //règle la borne numérique numéro 7 de la carte Arduino en mode sortie pinMode(LEDvert,OUTPUT); //règle la borne numérique numéro 8 de la carte Arduino en mode sortie } void loop(){ if(((((distanceSensor1.measureDistanceCm()+1)<6)&&(distanceSensor1.measureDistanceCm()+1)>0))||((distanceSensor2.measureDistanceCm()+1<6)&&(distanceSensor2.measureDistanceCm()+1)>0)) {// Si l'un des deux capteurs HC-SR04 détecte un véhicule monServomoteur.write(90); // la barrière s'ouvre digitalWrite(LEDrouge,LOW); digitalWrite(LEDvert,HIGH); // La LED s'allume en vert delay(5000); }else { monServomoteur.write(180); digitalWrite(LEDrouge,HIGH); // La LED s'allume en rouge digitalWrite(LEDvert,LOW); // la barrière se ferme } delay(100); } |
Vous pouvez voir aussi



14 commentaires
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top
DJ.Houssein 12-12-2323
J'ai bien aime
lourme 18-10-2323
désolé mais le code est vraiment a chier ça marche pas du tout si c'est pour mettre de la merde il vaut mieux ne rien mettre au lieu de faire perdre du temps merci au revoir a jamais
Colin 11-05-2323
Bonjour savez vous comment corriger l erreur de la ligne 17 pour l initialisation? merci beaucoup?
Colin 11-05-2323
Bonjour j ai un probleme avec l initialisation ligne 17 savez vous comment la régler? merci beaucoup
Jean-Jacques Roussot 10-05-2323
Trop bien je m'amuse comme un fou ! ♥
Jean-Jacques Roussot 10-05-2323
Trop nul ! 0 étoiles !
Jean-Jacques Roussot 10-05-2323
Nul. Vous avez de la chance que le minimum est 1 étoile et pas 0 !
salah 05-04-2323
il ya une erreur dans la ligne 17
alpha 25-03-2323
Merci pour le code !!
JEAN MARIE 07-12-2222
Bonjour, tout d'abord bravo pour tous ces tutos qui sont très instructifs. Total novice dans ce domaine, je souhaiterai savoir si avec une Arduino ou ESp32 ou autre on peut manœuvrer un moteur 12V et ou 24V. Voir un de chaque sur la même carte! Je me suis installé des panneaux solaires sur rails circulaires et donc ils pivotent. Pour l'instant la commande se fait via routines horaires appli téléphone. Je ne veux pas de tracker solaire mais je voudrai que les panneaux tournent selon un azimut défini et un horaire définis à l'avance. Exemple : à 9h05 ils se mettent au 110°, puis à 10h15 au 150° ... idem pour la motorisation de l'élévation ... Exemple à 9h30 le vérin s'actionne pour avoir un angle de 40°, puis à 11h de 38° .... Pour la sécurité en cas de coup de vent, il faut pouvoir commander les descente des panneaux via appli ou autre mieux encore si l on peut coupler un capteur de vent ??? Actuellement la rotation se fait avec des moteurs de 24v faible ampérage et les vérins de l'élévation sont en 12V et 3 ampères. Pour avoir une idée de ce que j'ai fait ... https://www.youtube.com/channel/UCkv_Q-9GmJEI64-n4IGztFw En vous remerciant par avance... Cordialement
Victoire 28-09-2222
Votre code bug au niveau d'initiation de capteur ultrason
Robert-Abdel-Kassem 28-03-2222
Vot tuteau é nule, mon amy jacqui expliqu bocout mieue
Brahim abnoune 30-05-2121
Bonjour, je veux remerciais bien pour qui ce que tu as fait je parle sur la maquette de la barrière automatique mais il y a une problème , J'ai fait cette expérience et j'ai entré le code, mais quand je suis entré dans le parking, cela s'est fait dans le bon sens, mais quand j'en suis sorti, la barrière n'a pas été soulevée, donc je savais ce qui s'était passé. Y a-t-il quelqu'un pour aider lui s'il te plait
Med Ali 31-05-2121
Salut, Vérifiez si le deuxième capteur HC-SR04 est fonctionnel