Capteur de distance ESP32 Projet Servomoteur
Réalisation d’une barrière de parking automatique avec la carte ESP32
Une barrière de parking automatique est un dispositif utilisé pour contrôler l’accès à un parking ou à une autre zone restreinte. Elle se compose d’un poteau ou d’un bras monté sur une base motorisée et qui peut être relevé ou abaissé pour bloquer ou autoriser l’accès à la zone.
Les barrières de parking automatiques sont généralement contrôlées par un système de contrôle central, qui peut être un ordinateur ou un microcontrôleur tel qu’une carte Arduino. Le système de contrôle est responsable de la réception des données d’entrée provenant de capteurs ou d’autres dispositifs, tels que des lecteurs RFID ou des claviers, et d’utiliser ces données pour déterminer quand relever ou abaisser la barrière.
Pour utiliser une barrière de parking automatique avec une carte ESP32, vous devrez connecter la barrière à la carte et écrire un programme pour contrôler la barrière en fonction des données d’entrée provenant de capteurs ou d’autres dispositifs.
Pour connecter la barrière de parking automatique à la carte ESP32, vous devrez utiliser des fils pour connecter la base motorisée de la barrière aux broches appropriées sur la carte ESP32. Vous devrez également utiliser des fils supplémentaires pour connecter des capteurs ou d’autres dispositifs d’entrée à la carte ESP32.
But de ce projet:
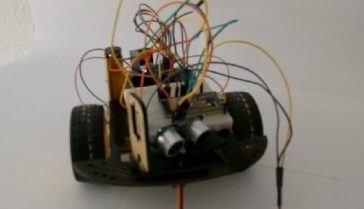
Dans ce projet on allons simuler une barrière de parking automatisée avec la carte ESP32. Cette maquette reprend le fonctionnement général des systèmes automatisés qui permettent l’accès aux parcs publiques que l’on trouve dans les gares, aéroports, cinémas, supermarchés, etc.
Notre barrière s’ouvre à l’aide d’un servomoteur lorsque le capteur sonore HC-SR04 détecte une véhicule et se ferme automatiquement dans le cas contraire.
Composants nécessaires
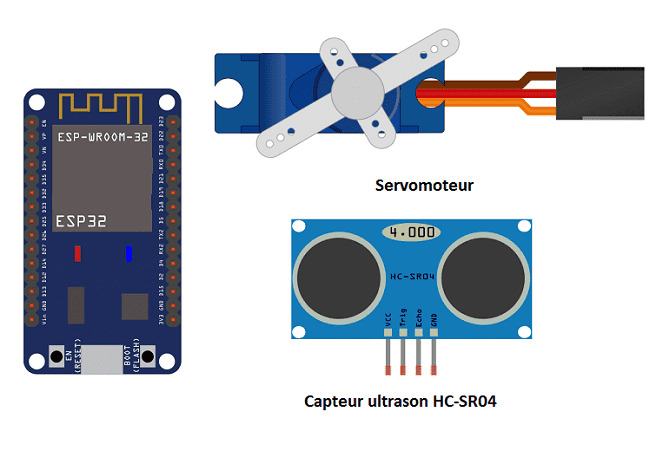
carte ESP32

La carte ESP32 est une carte de microcontrôleur basée sur le microcontrôleur ESP32 d’Espressif Systems. C’est une puce système à faible coût et à faible consommation d’énergie conçue pour les applications de l’Internet des objets (IoT).
capteur sonore HC-SR04
Le capteur HC-SR04 est un capteur de distance ultrasonique couramment utilisé dans les projets électroniques. Il mesure la distance en envoyant un signal ultrasonique et en mesurant le temps qu’il lui faut pour rebondir sur un objet et retourner au capteur. Le capteur HC-SR04 est capable de mesurer des distances allant de 2 cm à 400 cm avec une précision de 3 mm.
un servomoteur

Un servomoteur est un moteur électrique qui peut être contrôlé avec précision pour effectuer des mouvements de rotation à un angle spécifique. Ils sont souvent utilisés dans les projets de robotique et de mécanique pour contrôler la position et le mouvement de différents éléments, tels que les bras de robots, les roues de véhicules télécommandés et les mécanismes de verrouillage.
des fils de connexion

Les fils de connexion sont des fils électriques utilisés pour connecter des composants électroniques à une carte de développement Arduino. Ils sont généralement utilisés pour connecter des capteurs, des actionneurs, des afficheurs et d’autres composants à la carte Arduino afin de créer des circuits électroniques.
une plaque d’essai

Une plaque d’essai est un type de carte de développement électronique qui permet aux développeurs de tester et de prototyper facilement des circuits électroniques. Elles sont souvent utilisées par les développeurs pour tester rapidement des idées et des conceptions avant de les intégrer à un projet plus important ou de les intégrer dans une carte de développement plus permanente.
une barrière sous forme d’un stylo
Montage du Parking
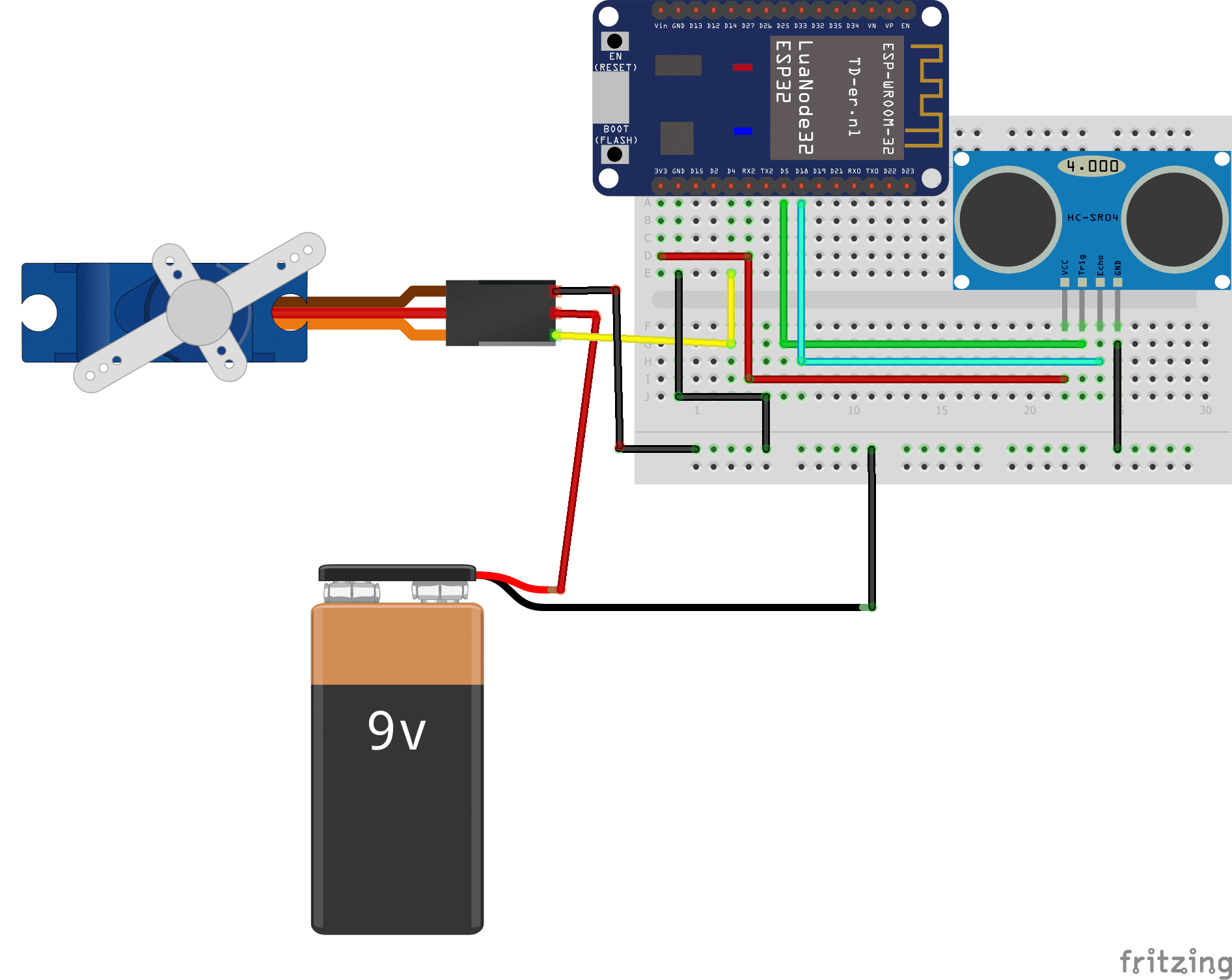
Pour réaliser le montage, on peut connecter
Pour le capteur sonore HC-SR04 :
- la broche VCC à la broche 3.3V de la carte ESP32
- la broche Trig à la broche D5 de la carte ESP32
- la broche ECHO à la broche D18 de la carte ESP32
- la broche GND à la borne GND de la carte ESP32
Pour le servomoteur:
- fil rouge : fil de l’alimentation à relier à la borne(+) d’une pile de 9V
- fil marron : fil à relier à la borne GND de la carte ESP32
- fil Jaune : fil de signal de positionnement branché à la broche D4 de la carte ESP32
Programme en micropython
Voici le programme pour le système de parking automatisé contrôlée par la carte ESP32:
from hcsr04 import HCSR04
from machine import Pin,I2C
import time
p4 = machine.Pin(4)
servo = machine.PWM(p4,freq=50)
sensor = HCSR04(trigger_pin=5, echo_pin=18,echo_timeout_us=1000000)
while True:
distance = sensor.distance_cm()
print(distance,’ cm’)
if (distance<6 and distance>0): # si le capteur détecte un véhicule
servo.duty(70) # la barrière du parking se lève
time.sleep_ms(5000)
else:
servo.duty(130) #la barrière se baisse
Vous pouvez voir aussi


0 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top