Un système de remplissage automatique des bouteilles est un équipement automatisé conçu pour remplir des bouteilles de différentes tailles et formes avec un produit liquide ou en poudre de manière efficace et précise. Ces systèmes sont souvent utilisés dans les industries alimentaire, cosmétique et pharmaceutique pour remplir des bouteilles de produits tels que des boissons, des sauces, des lotions et des médicaments.
Un système de remplissage automatique des bouteilles peut être composé de plusieurs éléments, notamment un dispositif de transport des bouteilles, une ou plusieurs têtes de remplissage, une station de nettoyage et d’étiquetage et un système de contrôle et de commande. Le système est généralement conçu pour être facilement configurable pour remplir différents types de bouteilles et de produits, et peut être équipé de dispositifs de contrôle de qualité pour assurer la précision et la conformité aux normes.
Les systèmes de remplissage automatique des bouteilles peuvent être utilisés dans de nombreuses tailles de production, allant de petits ateliers de fabrication artisanale à de grandes usines de production en série. Ils peuvent être utilisés pour remplir des bouteilles en verre, en plastique ou en métal, et peuvent être équipés de dispositifs de remplissage par gravité, par pression ou par aspiration pour convenir à différents types de produits et de bouteilles.
But de ce projet:
Il est possible de créer un système de remplissage automatique des bouteilles en utilisant un microcontrôleur Arduino et divers composants électroniques et mécaniques. Voici comment cela pourrait être réalisé :
- Tout d’abord, vous devrez décider du type de bouteilles que vous souhaitez remplir et du produit que vous allez utiliser. Cela vous aidera à déterminer les spécifications du système, telles que la capacité de remplissage, la vitesse de remplissage et la précision de remplissage.
- Ensuite, vous devrez choisir un dispositif de transport des bouteilles. Cela peut être un tapis roulant, une chaîne ou un convoyeur à rouleaux, ou tout autre dispositif qui convient à vos besoins.
- Vous aurez également besoin d’une ou plusieurs têtes de remplissage, qui seront responsables de remplir les bouteilles avec le produit. Vous pouvez utiliser des têtes de remplissage à pression, à aspiration ou à gravité en fonction du produit et de la bouteille.
- Vous devrez également mettre en place une station de nettoyage et d’étiquetage pour assurer la propreté des bouteilles et ajouter des étiquettes ou d’autres marques de qualité.
- Enfin, vous devrez écrire le code Arduino pour contrôler tous les éléments du système de remplissage automatique des bouteilles. Le code devra inclure des instructions pour déplacer les bouteilles, remplir les bouteilles et effectuer d’autres tâches nécessaires.
Il est important de noter que la création d’un système de remplissage automatique des bouteilles peut être un projet complexe et nécessitera des connaissances en électronique et en mécanique. Il est recommandé de se familiariser avec les différents composants et de suivre des tutoriels ou des guides de montage avant de se lancer dans ce projet.
Dans ce projet, on va construire un système de remplissage automatique des bouteilles commandé par la carte Arduino.
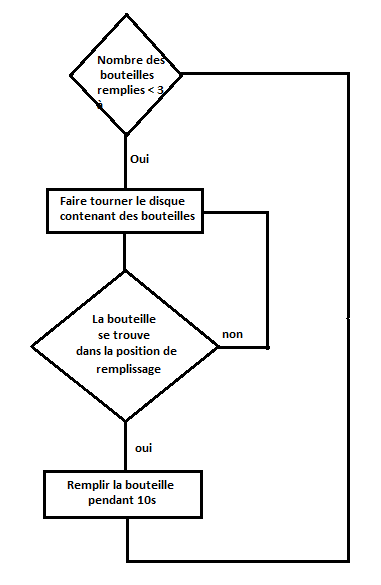
Fonctionnement du système de remplissage des bouteilles
Composants nécessaires
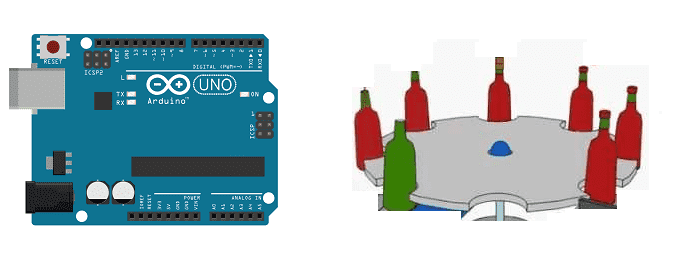
carte Arduino

Une carte Arduino est une carte de développement électronique basée sur un microcontrôleur. Elle est conçue pour être facilement utilisable par les développeurs et les hobbyistes pour créer des projets électroniques.
Les cartes Arduino sont principalement utilisées pour contrôler des appareils électroniques en utilisant du code informatique, mais elles peuvent également être utilisées pour traiter et afficher des données. Elles sont souvent utilisées dans des projets de robotique, de domotique, de domaine de l’Internet des objets (IoT) et dans de nombreux autres domaines de l’électronique de loisir et professionnelle.
capteur infrarouge KY-032
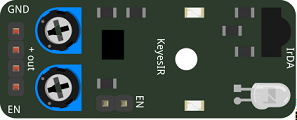
Le capteur infrarouge KY-032 est un capteur de distance à infrarouge utilisé pour détecter les objets et mesurer les distances. Il est généralement utilisé dans les projets de robotique et de contrôle de mouvement pour permettre aux robots de détecter et d’éviter les obstacles.
Le capteur infrarouge KY-032 est composé d’un émetteur infrarouge et d’un récepteur infrarouge, qui sont montés sur un boîtier compact. Lorsque l’émetteur émet une lumière infrarouge, elle rebondit sur les objets et est captée par le récepteur. Le capteur mesure alors la distance de l’objet en fonction du temps qu’il a fallu à la lumière infrarouge pour être renvoyée.
Le capteur infrarouge KY-032 est facile à utiliser et peut être connecté à un microcontrôleur ou à tout autre dispositif de commande électronique en utilisant des fils et des connecteurs appropriés. Il est généralement assez peu coûteux et peut être trouvé dans de nombreux magasins en ligne ou de fournitures de robotique. Cependant, il est important de noter que le capteur infrarouge KY-032 a une portée relativement courte et peut être perturbé par la lumière ambiante, ce qui peut affecter sa précision.
relais
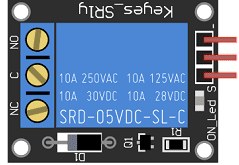
Un relais est un interrupteur électrique qui est utilisé pour mettre un circuit sous ou hors tension. Il est souvent utilisé pour contrôler un circuit à haute puissance avec un signal à faible puissance, comme un interrupteur ou un signal de commande informatique. Les relais sont utilisés dans une grande variété d’applications, notamment les systèmes de commande industrielle. Ils peuvent être utilisés pour contrôler des moteurs, des lumières et d’autres charges électriques. Certains relais sont conçus pour commuter rapidement un circuit sous et hors tension, tandis que d’autres sont conçus pour un contrôle plus précis et peuvent être utilisés pour moduler le courant qui traverse un circuit.
moteur pas à pas 17HS4401

Le moteur pas à pas 17HS4401 est un type de moteur pas à pas à aimant permanent qui est souvent utilisé dans les applications de positionnement précis. Il est caractérisé par sa taille compacte, sa haute précision et sa faible consommation d’énergie.
Le moteur pas à pas 17HS4401 est constitué d’un rotor constitué d’aimants permanents et d’un stator constitué de bobines de fils électriques. Il est alimenté par une tension de 5 V à 12 V et peut être contrôlé en envoyant des impulsions électriques au stator via un microcontrôleur ou un ordinateur.
Pour utiliser le moteur pas à pas 17HS4401, vous devez d’abord le connecter à un microcontrôleur ou à un ordinateur en suivant le schéma de câblage recommandé. Vous pouvez ensuite écrire du code pour contrôler le moteur en envoyant des impulsions électriques au stator en utilisant une bibliothèque de logiciels ou une API de bas niveau. Vous pouvez ajuster la vitesse et le sens de rotation du moteur en modifiant la fréquence et la polarité des impulsions électriques.
Il est important de suivre les instructions du fabricant et de respecter les précautions de sécurité lors de l’utilisation du moteur pas à pas 17HS4401.
carte CNC
Une carte CNC (Computer Numerical Control) est un composant électronique utilisé pour contrôler les mouvements d’une machine-outil CNC (Computer Numerical Control). Elle permet de transformer les codes G (un langage de programmation utilisé pour décrire les mouvements de la machine) en impulsions électriques qui sont envoyées aux moteurs pas à pas ou aux servomoteurs qui commandent les mouvements de la machine.
Une carte CNC est généralement connectée à un ordinateur via un port USB ou une interface réseau, et utilise un logiciel de contrôle de la machine pour envoyer les codes G et recevoir les données de positionnement en retour. Elle peut être utilisée avec une variété de machines-outils, telles que les fraiseuses, les tourneuses et les imprimantes 3D.
Pour utiliser une carte CNC, vous devez d’abord la connecter à un ordinateur et à la machine-outil en suivant le schéma de câblage recommandé. Vous pouvez ensuite utiliser un logiciel de contrôle de la machine pour envoyer des codes G et contrôler les mouvements de la machine. Il est important de suivre les instructions du fabricant et de respecter les précautions de sécurité lors de l’utilisation d’une carte CNC.
tige support

le tige de support est un élément mécanique utilisé pour maintenir une bouteille en place pendant le processus de remplissage des bouteilles. Elle peut être utilisée dans notre système de remplissage automatique de bouteilles pour permettre au produit de remplir la bouteille de manière précise et uniforme.
La tige de support est généralement fixée à une base solide et peut être ajustée pour s’adapter à différentes tailles et formes de bouteilles. Elle peut être fabriquée en acier, en aluminium ou en plastique et doit être conçue de manière à résister à la pression et aux forces exercées pendant le remplissage.
disque

Notre système de remplissage de bouteilles utilise un disque rotatif pour remplir les bouteilles de manière efficace et précise. Le disque peut être monté sur un axe et utilisé pour distribuer le produit de manière uniforme dans les bouteilles qui passent sous le disque.
Le disque peut être conçu pour remplir des bouteilles de différentes tailles et formes et peut être ajusté pour remplir des quantités précises de produit. Il est alimenté par le moteur pas à pas 17HS4401 et peut être facilement intégré dans notre système de remplissage automatique de bouteilles.
courroie de distribution

Notre machines de remplissage de bouteilles utilisent une courroie de distribution pour transmettre la puissance mécanique d’un axe à un autre. Le moteur pas à pas 17HS4401 est monté sur une poulie fixe et une courroie de distribution peut être utilisée pour transmettre la puissance mécanique à une autre poulie montée sur un axe en mouvement.
pompe à eau de 12V

Une pompe à eau de 12 V est une pompe électrique qui utilise un moteur électrique alimenté par une tension de 12 V pour pomper des liquides à travers un tuyau. Elle est souvent utilisée dans les applications de refroidissement, de transfert de liquides et de systèmes de distribution d’eau.
batterie de 9V

Une batterie de 9 volts est une pile qui fournit une tension de sortie de 9 volts. Elles sont souvent utilisées dans les appareils électroniques portables tels que les radiodiffuseurs, les jouets et les outils électroniques. Elles sont également couramment utilisées dans les applications de bricolage et de loisir, telles que les circuits électroniques et les projets de robotique.
plaque d’essai

Une plaque d’essai est un type de carte de développement électronique qui permet aux développeurs de tester et de prototyper facilement des circuits électroniques. Elles sont souvent utilisées par les développeurs pour tester rapidement des idées et des conceptions avant de les intégrer à un projet plus important ou de les intégrer dans une carte de développement plus permanente.
Les plaques d’essai sont généralement basées sur un microcontrôleur, qui est un processeur facile à utiliser et à programmer qui peut être utilisé pour contrôler une variété de circuits électroniques. Les plaques d’essai incluent généralement des broches d’extension qui permettent de connecter facilement des composants électroniques tels que des capteurs, des afficheurs, des moteurs et d’autres composants.
fils de connexion

Les fils de connexion sont des fils électriques utilisés pour connecter des composants électroniques à une carte de développement ESP32. Ils sont généralement utilisés pour connecter des capteurs, des actionneurs, des afficheurs et d’autres composants à la carte ESP32 afin de créer des circuits électroniques.
Il existe deux types de fils de connexion: les fils de connexion mâle-mâle et les fils de connexion mâle-femelle. Les fils de connexion mâle-mâle sont utilisés pour connecter des composants qui ont tous deux des broches mâles, tandis que les fils de connexion mâle-femelle sont utilisés pour connecter des composants avec une broche mâle et une broche femelle.
Les fils de connexion sont généralement fabriqués en cuivre ou en alliage de cuivre et sont revêtus d’un isolant en plastique pour protéger les fils électriques et empêcher les courts-circuits. Ils sont disponibles dans une variété de couleurs pour aider à identifier et organiser les différents fils dans un circuit.
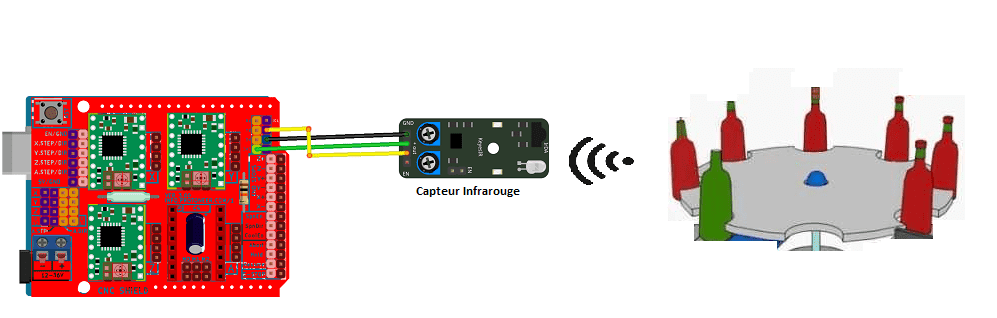
Montage de la carte Arduino et le capteur capteur infrarouge KY-032
On utilise la capteur infrarouge pour détecter s’il existe une bouteille dans la bonne position pour la remplir.
- On connecte la broche (+) du capteur à la broche 3.3V de la carte Arduino
- On connecte la broche GND du capteur à la broche GND de la carte Arduino
- On connecte la broche OUT du capteur à la broche A4(SDA) de la carte Arduino
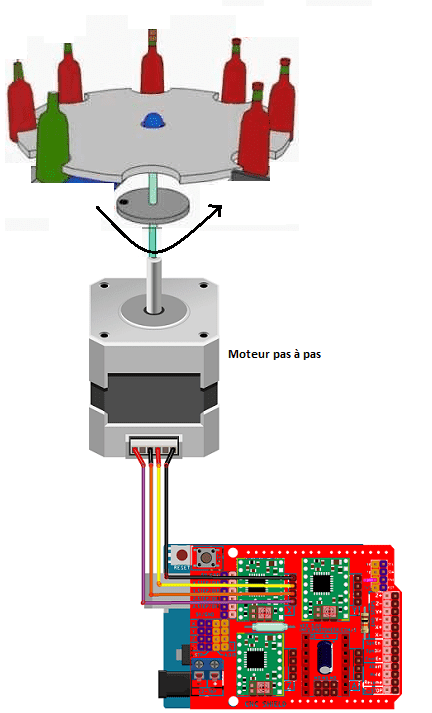
Montage de la carte Arduino avec le moteur pas à pas
Le rôle du moteur pas à pas est de tourner le disque contenant les bouteilles. On branche le moteur pas à pas à la carte cnc qui est connectée à la carte Arduino.
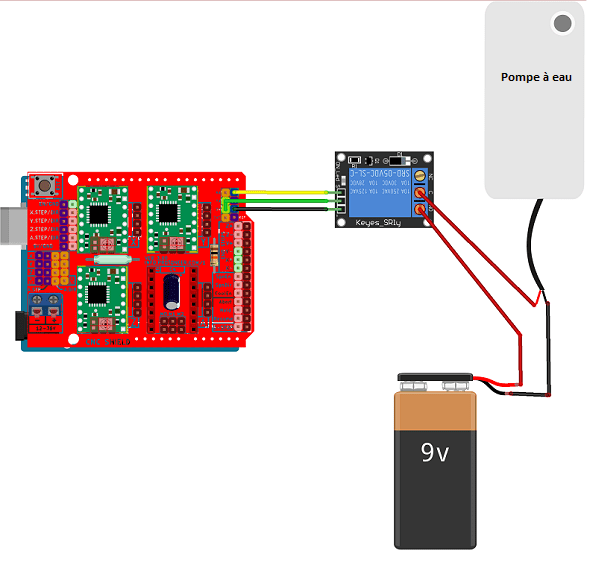
Montage de la carte Arduino avec la pompe à eau
Le relais est le composant intermédiaire entre la carte Arduino et la pompe à eau. Elle permet à la carte Arduino de commander la pompe à eau
Le rôle du relais est de faire démarrer ou arrêter la pompe responsable du remplissage des bouteilles.
- On connecte la borne (-) du relais à la broche GND de la carte Arduino
- On connecte la borne (+) du relais à la broche 3.3V de la carte Arduino
- On connecte la borne (S) du relais à la broche A5 (SCL) de la carte Arduino
Programme Arduino
Voici le programme qui permet de commander le système de remplissage automatique des bouteilles par la carte Arduino.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |
int analogPin = A4;//le capteur infrarouge est connecté à la broche A4 de la carte Adruino int val; int nbr_bouteilles; // pour la configuration du moteur pas à pas const int StepX = 2; const int DirX = 5; int pulseWidthMicros = 1000; // microseconds int millisBtwnSteps = 15000; const int relais_moteur = A5; // le relais est connecté à la broche A5 de la carte Adruino void setup() { nbr_bouteilles=1; pinMode(relais_moteur, OUTPUT); pinMode(StepX,OUTPUT); pinMode(DirX,OUTPUT); Serial.begin(9600); } void loop() { if (nbr_bouteilles<=3) { val = analogRead(analogPin); // lire la valeur retournée par le capteur infrarouge if ((val < 10)&&(val > 0)) // si la bouteille est dans la bonne position { Serial.println(val); nbr_bouteilles++; digitalWrite(relais_moteur, HIGH); // demarrer la pompe à eau delay(9000); // remplissage pendant 9s digitalWrite(relais_moteur, LOW); // arret de la pompe à eau translationX(HIGH,LOW,100); // faire tourner le disque } else { translationX(HIGH,LOW,100); // faire tourner le disque } } } void translationX (uint8_t pin1, uint8_t pin2,int stepsPerRev1){ digitalWrite(StepX, pin1); // Enables the motor to move in a particular direction // Makes 200 pulses for making one full cycle rotation for (int i = 0; i < stepsPerRev1; i++) { digitalWrite(StepX, pin1); delayMicroseconds(pulseWidthMicros); digitalWrite(StepX, pin2); delayMicroseconds(millisBtwnSteps); } } |
Vous pouvez voir aussi



0 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top